FAQ – AgiBot D1 Pro quadruped robot
What is the AgiBot D1 Pro quadruped robot?
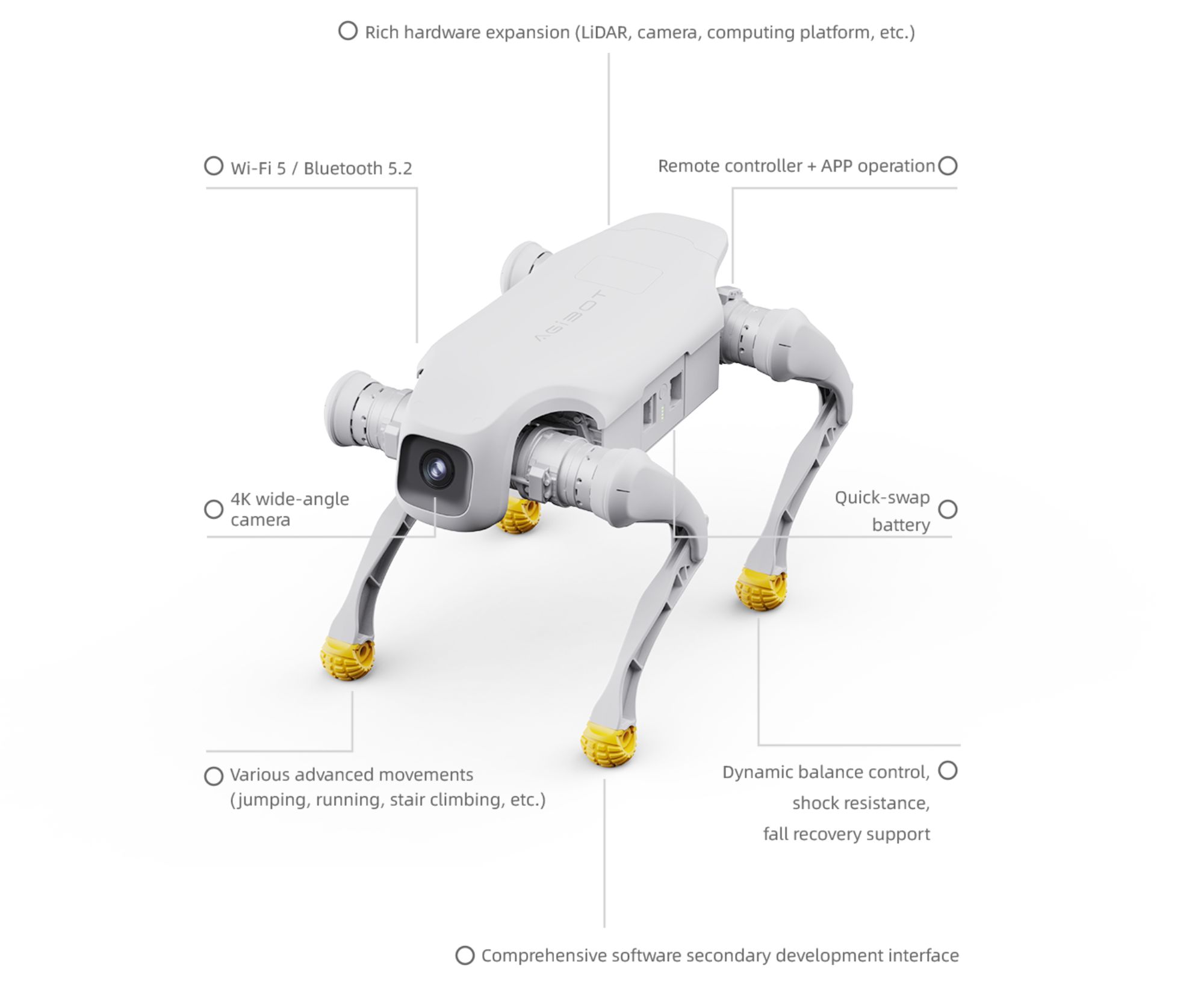
The AgiBot D1 Pro is a quadruped robot designed for demonstrations, certain higher-education projects, applied research, and light exploration or inspection scenarios. It stands out in particular for its dynamic locomotion based on reinforcement learning, designed to improve stability, agility, and terrain adaptation.
What are the mobility capabilities of the D1 Pro?
The D1 Pro is presented with a high speed for its category, stair-climbing, jumping, and slope-traversing capabilities. Depending on the configuration and use scenario, it can suit environments with uneven floors, small steps, and moderate obstacles. For a real project, it is still advisable to validate the expected performance according to the actual terrain, payload, and operating conditions.
Why can the D1 Pro be interesting for a lab, a school, or a demonstrator?
The AgiBot D1 Pro provides access to an agile quadruped platform without moving into the budget range of a more expensive industrial robot. It can therefore be an interesting basis for projects around locomotion, mobile perception, navigation over varied terrain, or embodied robotics in an educational, exploratory, or event context.
Is the robot suitable for higher education and research?
Yes, the D1 Pro can suit universities, engineering schools, and laboratories that want to work on quadruped mobility, terrain adaptation, perception-guided navigation, or the fusion of data from multiple sensors. However, it is important to verify that the Pro version matches the level of openness and integration expected for your project.
Is the D1 Pro relevant for public demonstrations or events?
Yes, its agility, speed, and dynamic movements make it an interesting platform for technology demonstrations, STEM events, trade shows, or innovation-oriented activations. It is particularly suited to scenarios where visual impact, mobility, and reliability matter more than carrying heavy payloads.
Can it be used for light inspection or security applications?
The D1 Pro can suit light inspection pilots or demonstrators on sites with steps, slopes, or uneven ground, for example on a campus, in a technical building, or on a demo site. For more intensive duty cycles, harsher environmental constraints, or a greater need for protection, it may be relevant to consider a more robust version or another quadruped platform.