Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,05 € d'éco-participation
Le servomoteur Dynamixel XC430-W240-T présente l'un des couples les plus puissants de sa catégorie, pour une consommation énergétique réduite.
Référence constructeur : 902-0147-000
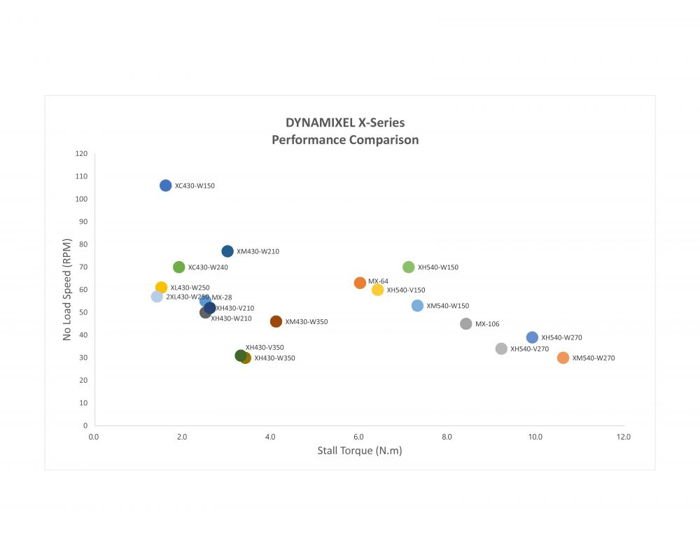
Le modèle XC430-W240-T est un servomoteur à connexion TTL offrant un rapport de réduction de 245,2:1 pour une vitesse hors charge de 70 tours par minute. C'est un servomoteur qui vient se positionner au dessus du servo XL 430 avec son couple élevé, assorti d'une consommation énergétique réduite. Ses caractéristiques lui permettent d'équiper des robots plus puissants ou des engins mobiles conçus pour les terrains accidentés.
Le servomoteur Dynamixel XC430-W240-T s'accompagne d'un palonnier compatible prêt à installer, ainsi que d'un set de vis complet pour son montage. Vous disposez également d'un câble robotique X3P de 18 cm pour sa connexion à votre microcontrôleur.
Dynamixel de Robotis est une gamme complète de servomoteurs intégrant tous les éléments indispensables à un servo intelligent, autonome et ultra-adaptable. À connexion RS232 ou TTL, les servomoteurs Dynamixel s'adaptent aux créations robotiques les plus complexes. Ils présentent différents niveaux de puissance et de vitesse, en fonction des besoins de votre création. Choisissez un rapport de réduction élevé pour un véhicule tout-terrain ou un robot destiné à transporter de lourdes charges. Préférez un servomoteur rapide pour vos appareils les plus agiles.
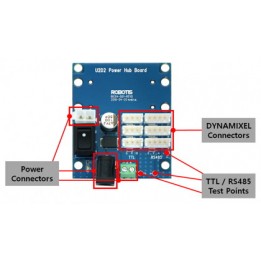
Un servomoteur Robotis Dynamixel est programmable de A à Z par le biais d'un microcontrôleur comme Arduino ou Raspberry Pi. Connectez-le avec un câble robotique X3P : vous pouvez chaîner plusieurs servomoteurs de la même façon.
Les servomoteurs Dynamixel sont équipés d'une coque à la conception innovante, qui réduit la dissipation thermique et autorise différentes configurations de montage. Les efforts exercés sur les câbles de connexion sont également limités.
Trouvez les bonnes informations sur le servomoteur Dynamixel XC430-W240-T avec cette liste de liens rassemblés spécialement pour vous :
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Le servomoteur Dynamixel XC430-W240-T présente l'un des couples les plus puissants de sa catégorie, pour une consommation énergétique réduite.
Référence constructeur : 902-0147-000