Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Einschließlich 0,05 € für die Ökosteuer
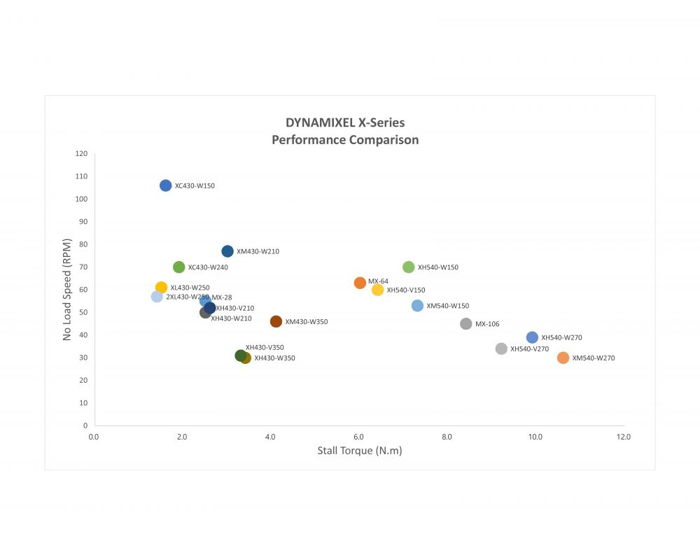
Der Servomotor Dynamixel XC430-W240-T weist eines der leistungsfähigsten Drehmomente seiner Kategorie auf, und das bei einem niedrigen Stromverbrauch.
Das Modell XC430-W240-T ist ein Servo mit TTL-Kommunikation, der ein Untersetzungsverhältnis von 245,2:1 bei einer Geschwindigkeit ohne Auflast von 70 Umdrehungen pro Minute bietet. Es handelt sich um einen Servomotor, der sich über dem XL 430 Servo mit seinem hohen Drehmoment und seinem geringen Energieverbrauch befindet. Mit seinem hohen Drehmoment, verbunden mit einem niedrigen Energieverbrauch, eignet er sich für Ihre stärksten Roboter und mobilen Plattformen für unwegsames Gelände.
Unser Servomotor Dynamixel XC430-W240-T wird mit einem kompatiblen, installationsfertigen Träger und einem kompletten Schraubensatz für die Montage ausgeliefert. Sie verfügen außerdem über ein 18 cm langes X3P-Roboterkabel für den Anschluss an Ihren Mikrocontroller.
Dynamixel aus dem Hause Robotis ist eine umfassende Baureihe von Servomotoren, die alle unverzichtbaren Merkmale eines intelligenten, autonomen und extrem anpassungsfähigen Servos enthalten. In Verbindung mit einer RS232- oder TTL-Kommunikation passen sich die Dynamixel-Servomotoren selbst an die komplexesten Roboterkreationen an. Sie weisen verschiedenste Leistungs- und Geschwindigkeitsniveaus auf, je nach Bedarf Ihrer Kreation. Wählen Sie ein hohes Übersetzungsverhältnis für ein Geländefahrzeug oder einen Roboter, der schwere Lasten transportieren soll. Für die wendigeren Geräte eignet sich ein schneller Servomotor besser.
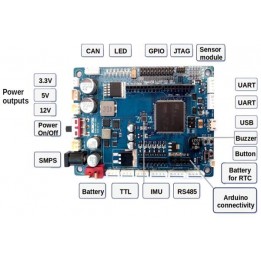
Ein Robotis Dynamixel Servomotor ist von A bis Z programmierbar über einen Arduino- oder Raspberry Pi-Mikrocontroller. Der Anschluss erfolgt über ein X3P-Roboterkabel. Ebenso können Sie mehrere Servomotoren miteinander verknüpfen.
Die Dynamixel Servomotoren sind mit einem innovativen Gehäuse ausgestattet, das als Kühlkörper fungiert und verschiedenste Montagekonfigurationen zulässt. Auch die Beanspruchung der Verbindungskabel wird reduziert.
Mit dieser speziell für Sie zusammengestellten Linkliste finden Sie alle wichtigen Informationen über den Servomotor Dynamixel XC430-W240-T:
Vergewissern Sie sich, dass der Dynamixel Servomotor richtig konfiguriert ist. Flashen Sie den Motor nochmal mit der Roboplus Software und konfigurieren Sie ihn erneut. Wenn das Problem weiterhin besteht, kontaktieren Sie uns.
Der Servomotor ist vermutlich schlecht montiert. Vergewissern Sie sich, das dieser gut verschraubt ist und das Servorad richtig sitzt (Punkt auf der Axe und auf der Innenseite des Servorades)
Der Dynamixel Servomotor hat sehr wahrscheinlich ein mechanisches Problem. Bitte kontaktieren Sie unseren technischen Support.
Überprüfen Sie die Stromversorgung und die Anschlüsse (zum Beispiel mit einem anderen Motor). Reinitialisieren Sie Ihren Servomotor Dynamixel. Falls das Problem weiterhin besteht, folgen Sie der Checkliste auf der Seite des Herstellers.
Das 1.0-Protokoll ist spezifisch für die Dynamixel AX- und MX-Serie. Protokoll 2.0 wurde mit der neuen X-Serie und Dynamixel Pro entwickelt. Die Steuertabellen des Protokolls 2.0 enthalten PID-Regler für eine äußerst präzise Einstellung der Servobewegungen. Die Firmware der Servos der MX-Serie kann für die Verwendung von Protokoll 2.0 aktualisiert werden. Weitere Informationen finden Sie auf den Seiten Protokoll 1.0 und Protokoll 2.0.

Der Servomotor Dynamixel XC430-W240-T weist eines der leistungsfähigsten Drehmomente seiner Kategorie auf, und das bei einem niedrigen Stromverbrauch.