Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
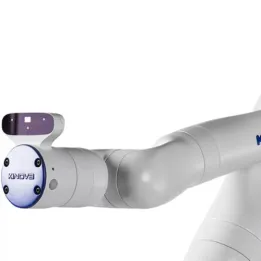
Il Nero è un braccio robotico a 7 assi (7-DoF) pensato per attività di ricerca nella robotica umanoide e nell’Embodied AI. Il suo design leggero e l’architettura aperta facilitano l’integrazione in laboratorio, la sperimentazione e l’installazione in diverse configurazioni (da tavolo, laterale, invertita).

Il Nero è un braccio robotico a 7 assi (7-DoF) pensato per attività di ricerca nella robotica umanoide e nell’Embodied AI. Il suo design leggero e l’architettura aperta facilitano l’integrazione in laboratorio, la sperimentazione e l’installazione in diverse configurazioni (da tavolo, laterale, invertita).