

































L’Ouster OSDome REV8 è un lidar imaging emisferico a corto raggio progettato per progetti di percezione 3D embedded, sicurezza, smart infrastructure, tracciamento di persone in ambienti interni e rilevamento di prossimità su robot mobili e veicoli autonomi.


L’Ouster OS1 Max REV8 è un lidar imaging a lunga portata progettato per progetti di percezione 3D embedded, robotica mobile, veicoli autonomi, mappatura, monitoraggio del traffico e della sicurezza e applicazioni industriali esigenti.


L’Ouster OS1 REV8 è un lidar imaging a media portata progettato per progetti di percezione 3D embedded, robotica mobile, veicoli autonomi, mappatura e infrastrutture intelligenti.


L’Ouster OS0 REV8 è un lidar imaging a corto raggio con campo visivo ultra ampio progettato per progetti di robotica mobile, percezione 3D embedded, automazione di magazzino e applicazioni industriali.


Il Doosan H2017 è un braccio robotico collaborativo a 6 assi progettato per applicazioni industriali che richiedono allo stesso tempo carico utile elevato, grande portata e precisione di movimento.

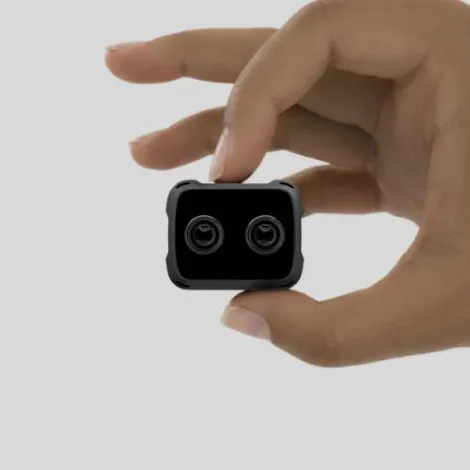
La ZED X Nano Stereo Camera di Stereolabs è una telecamera stereo di profondità a corto raggio progettata per la manipolazione robotica, gli umanoidi e i progetti di Physical AI.

Questo sensore di forza / coppia a 6 assi è progettato per la misura in tempo reale di forze e coppie sui bracci robotici xArm e 850.

Dispositivo di controllo progettato per la teleoperazione del braccio robotico PiPER di AgileX.


Il NVIDIA Jetson TX2 NX è un modulo di calcolo embedded progettato per applicazioni di intelligenza artificiale edge (Edge AI), visione embedded e robotica compatta.

I NVIDIA Jetson T4000 e NVIDIA Jetson T5000 sono moduli di calcolo embedded progettati per applicazioni di robotica avanzata, physical AI, AI embedded e inferenza edge (Edge AI).
La NVIDIA Jetson AGX Xavier è una piattaforma di calcolo embedded progettata per applicazioni di intelligenza artificiale periferica (Edge AI), robotica autonoma e sistemi industriali avanzati.
La NVIDIA Jetson Orin Nano è una piattaforma di calcolo embedded progettata per applicazioni di intelligenza artificiale periferica (Edge AI).

La batteria per Unitree R1 è una batteria di ricambio progettata per alimentare il robot umanoide Unitree R1.

La batteria per Unitree R1 è una batteria di ricambio progettata per alimentare il robot umanoide Unitree R1.


Il Unitree H2 è un robot umanoide bipede di grande formato progettato per lavori su locomozione, controllo del movimento, percezione embedded e, a seconda della configurazione scelta, sviluppo avanzato.

La batteria Unitree B2 è una batteria ad alta capacità progettata per alimentare il robot quadrupede Unitree B2.


Il telecomando per Unitree Go2 Air e Go2 Pro è un accessorio di controllo manuale progettato per gestire il robot più facilmente durante dimostrazioni, test e utilizzi sul campo.

Il RoboSense Airy Lite è un LiDAR 3D a 360° compatto progettato per applicazioni di robotica mobile, mappatura e navigazione.

La RoboSense AC2 è una telecamera di profondità progettata per la percezione robotica. Combina un LiDAR dToF solid-state, telecamere RGB stereo e una IMU per la manipolazione robotica, la modellazione 3D e la localizzazione.

/!\ Prodotto reso da un cliente con alcuni graffi estetici, senza alcun impatto sul funzionamento.
Il servomotore più potente della serie MX viene reinventato in una confezione di 6 servi Dynamixel MX-106T con comunicazione TTL. Per progetti ambiziosi !

Il RoboSense EM4 è un LiDAR digitale automotive-grade a lunga portata progettato per applicazioni di percezione avanzata, assistenza alla guida e mobilità autonoma di livello L3 e superiore.

Il RoboSense EMX è un LiDAR digitale automotive-grade a 192 canali progettato per applicazioni di percezione avanzata, assistenza alla guida e mobilità autonoma.


L’AgiBot D1 Max Pro è un robot quadrupede progettato per applicazioni industriali, ispezione e progetti di robotica mobile che richiedono una maggiore capacità di carico e una maggiore autonomia.