

















































Der SICK Laserscanner LMS111-10100 ist an viele verschiedene Anwendungen im Innen- und Außenbereich anpassbar und bietet einen hervorragenden Kompromiss zwischen Kompaktbauweise, Sparsamkeit und Leistung.


Der Robosense RS-Ruby 3D-Laser-Entfernungsmesser ist ein Lidar mit beeindruckender Leistung und ist bei jedem Wetter effizient. Die Zukunft autonomer Fahrzeuge nimmt mit diesem Laser bereits Gestalt an.


Robosense bietet uns eine neue Reihe von LiDAR Laser-Entfernungsmessern: RS-Helios-16P ist das leichteste und erschwinglichste Modell, bei dem das Leistungsniveau gewohnt hoch bleibt, mit Ethernet-Konnektivität!


Er ist klein, präzise, sparsam und schnell: Der 360° 2D-Laserscanner RPlidar A1M8 kann alle möglichen Aufgaben übernehmen, vom 3D-Mapping bis hin zur Hinderniserkennung.


Der RS-Lidar-M1 Laser-Entfernungsmesser ist ein hochauflösender Sensor, der für die Ausrüstung von Fahrzeugen mit autonomen Navigationssystemen entwickelt wurde. Er erleichtert die Entscheidungsfindung, indem er mögliche Hindernisse aufspürt, analysiert und klassifiziert.
Speziell für Raspberry Pi entwickeltes Kameramodul.


Der PhidgetSpatial Precision 3/3/3 von Phidgets ist ein kompakter und präziser Bewegungssensor, der dreidimensionale Bewegungen messen kann.
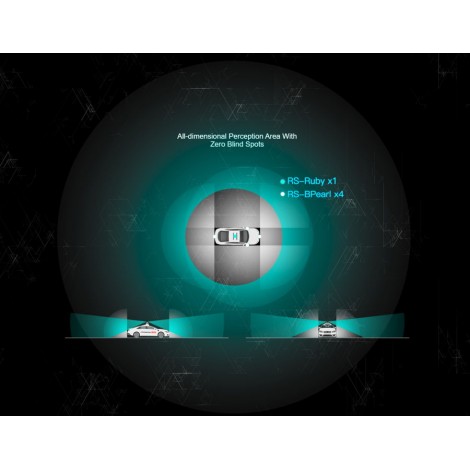
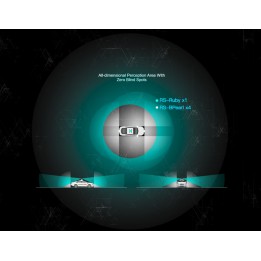
Für Forscher und Lehrer, die eine noch fortschrittlichere Lösung als das RS-Fusion-P3-System suchen, gibt es RS-Fusion-P5 von Robosense, eine hochauflösende Allianz aus einem LIDAR RS-RUBY und vier LIDAR RS-BPearl. Diese ermöglicht eine Kombination von Lang- und Kurzstreckenerkennung.

RS-Fusion-P3 von Robosense ist ein vollständiges und perfektioniertes Hinderniserkennungssystem. Es besteht aus zwei LIDAR-16 und einem LIDAR-32, die es Ihnen ermöglichen, Ihr eigenes autonomes Navigationssystem zu entwickeln.


Wollen Sie Ihren Kamerasensor Pixy 2 in zwei Achsen bewegen? Mit zwei Servomotoren und einer fixen Basis erfüllt das Pan & Tilt-Set alle Ihre Erwartungen. Kompatibel mit Arduino.


Beim OSDome handelt es sich um einen digitalen hemisphärischen LiDAR mit einem Sichtfeld von 180° und einer Reichweite von 20 Metern. Er verfügt über eine Auflösung, die 4 Mal höher ist, als bei anderen Sensoren.

Der OS2 Lidar zeichnet sich durch seine Reichweite von bis zu 400 Metern und seine ultrapräzisen Daten aus. Ermöglicht wird dies durch den L3 Chip.


Der OS1 LiDAR ist ein leistungsfähiger Sensor, der dank dem L3 Chip die beste Kombination im Hinblick auf die Reichweite, das Sichtfeld und die Auflösung bietet.


Ouster entwickelt seine OS Reihe mit dem LiDAR OS1 (Rev 6): 120 m Reichweite, eine Bildwiedergabe, die nahezu so präzise wie eine Videoaufnahme ist.


Der OS0 LiDAR hat ein ultragroßes Sichtfeld (90°), mit dem er alles sehen kann - vom Boden bis zur Decke.


Der LiDAR OS0 von Ouster bietet effiziente Unterstützung für Roboter-Navigation, für eine in Echtzeit mit hoher Präzision analysierte Route hat.


Sie brauchen eine leistungsfähige Kamera mit einem großen Sichtfeld? Die OAK-D W bietet diese zwei Optionen und erweist sich bei zahlreichen Projekten als sehr effizient.


Die OAK-D-SR ist eine kompakte und hochmoderne Computer-Vision-Kamera, die darauf ausgelegt ist, eine erhöhte Präzision auf kurzer Distanz zu bieten.


Die OAK-D Pro W verfügt über ein großes Sichtfeld und eignet sich perfekt für eine Vielzahl von Projekten.


Die OAK-D ist eine leistungsfähige und benutzerfreundliche Kamera, mit der sich Projekte, die ein Sichtvermögen erfordern, am Computer und unter Verwendung der KI erstellen lassen.


Die OAK-D CM4 Kamera kombiniert OAK-D mit dem Raspberry Pi CM4-Modul. Es ist eine hochwertige Computer-Vision-Lösung für Echtzeit-Objekterkennungs-, Bewegungs- und Positionsverfolgungs-, Mapping- und 3D-Modellierungs- sowie industrielle Inspektionsanwendungen.


Sie brauchen eine Kamera mit einem großen Sichtfeld und zu einem erschwinglichen Preis? Die OAK-1 Lite W von Luxonis ist das perfekte Produkt für Sie!


Bei der OAK-1 W handelt es sich um eine eingebaute RVB Kamera mit 12 Megapixeln und einem großen Sichtfeld.


Die OAK-1 MAX Kamera ist eine 32-MP-Kamera, die für Computer Vision- und KI-Anwendungen entwickelt wurde.