Petits bras robotiques
Dans quels types de projets utiliser un bras robotique ?
Les bras robotiques articulés sont nécessaires dans tout projet intégrant de la préhension :
- Pick and place (déplacer un objet sur une zone précise)
- Collecte d’échantillons
- Utilisation d’outils (robots soudeurs par exemple)
- Tests de produits (appuis répétés sur un écran de smartphone ou sur des boutons par exemple)
- Etc
Quels types de bras sont disponibles à la vente chez Génération Robots ?
Génération Robots propose deux grands types de bras robotisés :
- Les robots collaboratifs (cobots)
- Les bras robotiques de bureau
Qu’est-ce qu’un cobot ?
Un cobot (coopération + robotique), ou robot collaboratif, est un robot équipé de très nombreux capteurs, qui l’aideront à percevoir son environnement en temps réel.
Ainsi, le robot peut accomplir ses tâches aux côtés d’un humain, sans risquer de blesser ce dernier. Il s’agit le plus souvent de bras robotiques de grande taille, programmés pour s’arrêter immédiatement s’il détecte un opérateur trop près de lui.
Qu’est-ce qu’un bras robotique de bureau ?
Comme leur nom l’indique, les bras robotique de bureau ont une taille plus petite que les cobots, leur permettant d'être placés sur un bureau. un établi, un plan de travail…
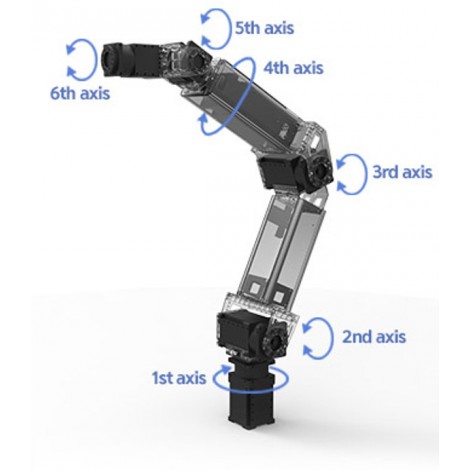
Le nombre d'axes est-il déterminant ?
Un robot avec 6 axes peut atteindre n’importe quel point de l’espace de travail, avec n’importe quelle orientation donnée. Cela rend ce type de robot optimal pour certaines tâches.
Par exemple :
- Saisir un outil par le bas ( tournevis ou autre), le retourner, et le replacer
- Écrire sur un bureau ou un mur
Pour des applications qui demandent une grande précision (notamment dans l’industrie), mais pas de mouvements complexes, un robot 6 axes peut-être surdimensionné, et il est recommandé de partir sur un bras 4 axes.
La plupart des bras robotiques comportent 6 axes, mais il est possible d’en avoir plus. Dans un espace où se trouvent des obstacles, un bras 7 ou 8 axes conviendra mieux qu’un 6 axes.
Il pourra contourner les obstacles et effectuer ses tâches (soudure, saisie d’objets).
Quels bras robotisés sont basés Arduino ?
Dans notre catalogue, les bras robotiques basés Arduino sont les suivants : la gamme Trossen Robotics, dont les bras ViperX, WidowX, PincherX, se programment dans l’environnement Arduino (Arduino IDE). Les robots de la marque Niryo Robotics sont compatibles Arduino et tous intègrent une carte Raspberry Pi. Les bras peuvent se piloter depuis une carte Arduino externe (maître).



















Le Robotis OMX-AI Motor Kit regroupe les moteurs DYNAMIXEL et composants essentiels pour assembler ou maintenir le bras OMX-AI. Conçu pour la recherche en IA physique, il s’intègre facilement à ROS 2, MoveIt 2 et Gazebo.

Le OMX-AI de Robotis est un bras robotique léger et open source dédié à la recherche en IA physique. Il facilite la collecte de données, l’apprentissage machine et l’intégration avec ROS 2, MoveIt 2 et Gazebo.


Le WidowX AI est idéal pour les chercheurs et ingénieurs souhaitant une plateforme robotique ouverte, évolutive et prête pour l’apprentissage automatique appliqué

Le Solo AI est une solution robotique intelligente conçue pour la collecte de données en environnement réel, l’apprentissage automatique embarqué et l’évaluation de modèles IA.


Le Mobile AI est la solution idéale pour les projets d’IA en robotique nécessitant une flexibilité maximale, une manipulation avancée et une station mobile prête à l’emploi.


Le Stationary AI est une station de travail robotique tout-en-un conçue pour la collecte de données, l’entraînement de modèles IA et les expérimentations en manipulation complexe. Dotée de quatre bras robotisés WidowX AI, elle est prête à l’emploi dès sa mise en service.
Le plateau de fixation pour le bras OpenManipulator-Pro vous permet de fixer facilement votre bras robotisé à une table ou à toute autre surface plane.

Le Base Plate-02 pour OpenManipulator vous permet de fixer votre accessoire TurtleBot 3 sur une surface plane et sécurisée.


Ce kit pour OpenManipulator RM-X52 vous est proposé ici avec ses servomoteurs. Il vous permet d'ajouter une nouvelle fonctionnalité à votre plateforme robotisée TurtleBot3 Waffle ou Waffle Pi.
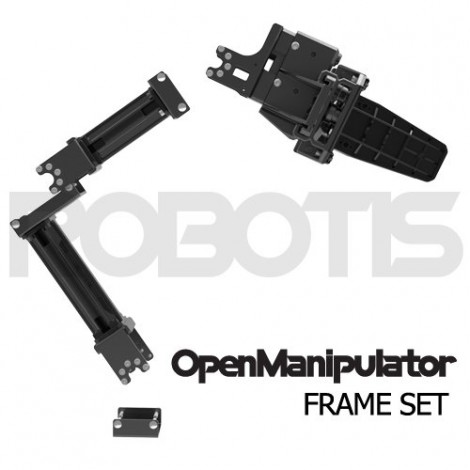
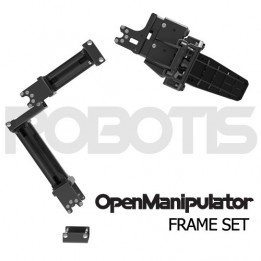
Concevez un bras robotisé OpenManipulator compatible ROS (similaire au bras RM-X52) pour votre robot TurtleBot3. Ce set inclut toutes les parties mécaniques et l'outillage nécessaires.

Certains robots ont plus de poigne que d'autres… et avec le préhenseur Robotis RH-P12-RN, le vôtre fera bientôt partie du club !

Le bras robotique 6 axes ROBOTIS OpenManipulator-PRO compatible ROS vous impressionnera aussi bien par sa résistance et sa solidité que sa précision et son habileté. Il vous permet un contrôle ultra-précis de la moindre de ses actions et s'accompagne d'un environnement de programmation ultra-complet.

Actionné par six servomoteurs intelligents Dynamixel, le bras robotique WidowX offre une grande agilité et un couple élevé.