Small robot arms programmable in Python, C++, Blockly (ROS, SDK)
Why should I used a robot arm in my project?
Articulated robotic arms are essential in any project that involves item grasping:
- Pick and place (moving an object to a specific spot)
- Sample gathering
- Tool handling (e.g. welding robots)
- Product testing (e.g. multiple taps on a smartphone screen or on buttons)
- Etc
What types of robot arms are available for sale at Generation Robots?
Generation Robots supplies two main types of robotic arms:
- Collaborative robots (cobots)
- Desktop robotic arms
What is a cobot?
A cobot, or collaborative robot, is equipped with many sensors which make them aware of their immediate surroundings in real time. This means that the robot can perform its tasks next to a human, without hurting him by accident. These are usually tall robotic arms, programmed to stop working instantly if it detects a worker in its "safety zone".
What is a desktop robotic arm?
As their name suggests, desktop robotic arms are smaller than cobots, allowing them to be mounted on a desk, a workbench, or any work surface.
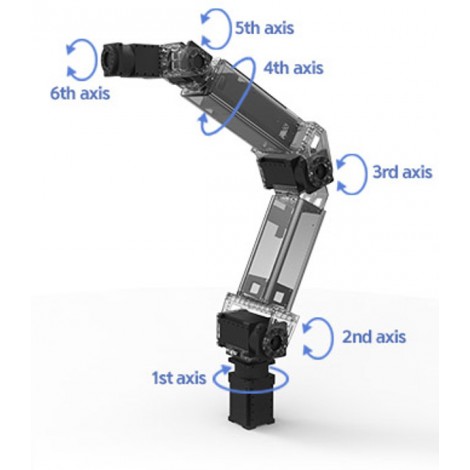
Is the number of axes a key factor?
A robot with 6 axes can reach any point in space, with any given orientation. 6 axes robot are perfect for performing a great number of tasks.
For example:
- Grab the bottom of a tool (screwdriver, hammer), turning it over, and put it back at its spot
- Writing on a desk or wall
- For applications that require a high degree of accuracy (especially in industry), but not intricate movements, a 6-axis robot may be oversized, and a 4-axis arm will do a fine job.
Most robotic arms have 6 axes, but it is possible to have more. In a space with obstructions, a 7 or 8 axis arm will be more suitable than a 6 axis.
A 7-axis arm will go around the obstacles in its pathway and perform its tasks (welding, picking up objects).
Which robotic arms are Arduino-based?
In our catalog, the robotic arms based on Arduino are the following: the Trossen Robotics range, including the ViperX, WidowX, PincherX arms, can be programmed in the Arduino environment (Arduino IDE).
Some robots from the Niryo Robotics brand are Arduino-compatible and they are all equipped with a Raspberry Pi board. The arms can be controlled from an master Arduino board.



















The Robotis OMX-AI Motor Kit includes the DYNAMIXEL motors and essential components needed to assemble or maintain the OMX-AI arm. Designed for Physical AI research, it integrates seamlessly with ROS 2, MoveIt 2, and Gazebo.

The Robotis OMX-AI is a lightweight and open-source robotic arm designed for Physical AI research. It simplifies data collection, machine learning, and integration with ROS 2, MoveIt 2, and Gazebo.


The WidowX AI is ideal for researchers and engineers looking for an open, scalable robotic platform ready for applied machine learning.

The Solo AI is an intelligent robotic solution designed for real-world data collection, embedded machine learning, and AI model evaluation.


The Mobile AI is the ideal solution for robotics AI projects requiring maximum flexibility, advanced manipulation, and a ready-to-use mobile station.


Stationary AI is an all-in-one robotic workstation designed for data collection, AI model training, and complex manipulation experiments. Equipped with four WidowX AI robotic arms, it is ready to use right out of the box.
The base plate for OpenManipulator-Pro robotic arm is used to easily fix your articulated arm to a table or any flat surface.

The Base Plate-02 for OpenManipulator is used for fixing your TurtleBot3 accessory securely on a flat surface.
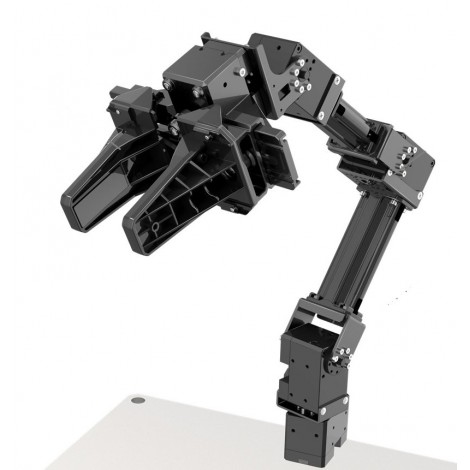

The OpenManipulator RM-X52 kit shown here includes servos. It allows you to equip your TurtleBot3 Waffle or Waffle Pi robotised platform with new functions.
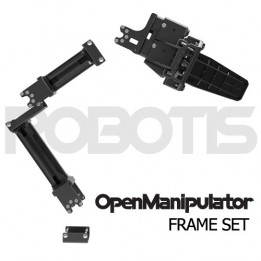
Want to design a OpenManipulator robotic arm (similar to the RM-X52 model) for your TurtleBot3 robot? This set includes all the tools and mechanical parts you need to build this ROS compatible robot arm.

Some robots can have a particularly strong grip... With the Robotis RH-P12-RN hand, your robot now belongs to the club!

The ROBOTIS Manipulator-Pro robotic arm robotic arm will impress you with its strength and robustness but also its accuracy and dexterity. It allows you to control its actions with the highest level of precision, and offers a very comprehensive programming environment. This robot arm is ROS compatible.

Operating with five intelligent Dynamixel servomotors, the WidowX robot arm offers some great opportunity.