

Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,10 € d'éco-participation
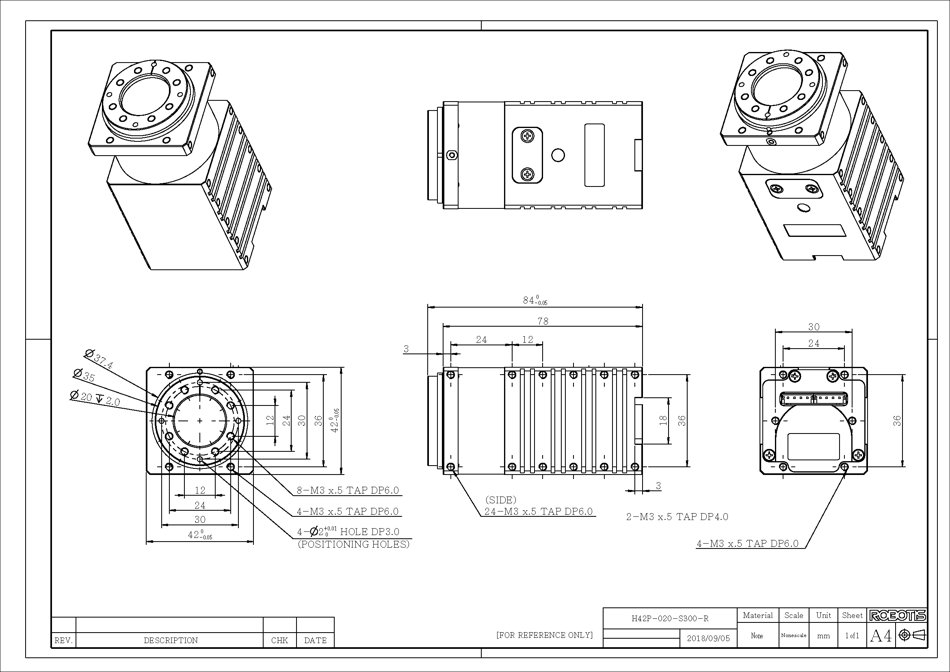
Plus stable, plus fiable, plus précis et réactif, le servomoteur Dynamixel-P H42P-020-S300-R est un choix privilégié pour vos projets de robotique de pointe ou industrielle. Tout en conservant le meilleur de la série Dynamixel-P, il se démarque aisément par l'amélioration de nombreux paramètres.
Comme tous les servomoteurs Dynamixel-P appartenant à la série R, le modèle Dynamixel-P H42P-020-S300-R est un actuateur tout-en-un équipé d'un bus de communication multidrop RS485.
Il offre 5 modes de contrôle opérationnels avec notamment le mode de contrôle étendu de la position, et le contrôle en PWM, particulièrement utile si vous souhaitez piloter les accélérations et freinages d'un robot mobile. Moins puissant que les servos déployant 100 ou 200 W, ce servomoteur garantit toutefois une excellente qualité de couple, de précision et de vitesse. Vous bénéficiez en effet d'une résolution égale à 607 500 pulsations par révolution, et un rapport de réduction de plus de 300:1. Ces performances ne nuisent en rien à la compacité de servo d'un peu plus de 300 g, montable sous diverses configurations sur vos systèmes robotisés.
La série Dynamixel-P a revu en profondeur les performances des servomoteurs Dynamixel, notamment en termes de fiabilité et de résolution. Chaque servo de la gamme permet ainsi une grande précision de mouvement, ainsi qu'un temps de réponse réduit. Ont également été revus à la baisse le bruit et le risque de surchauffe.
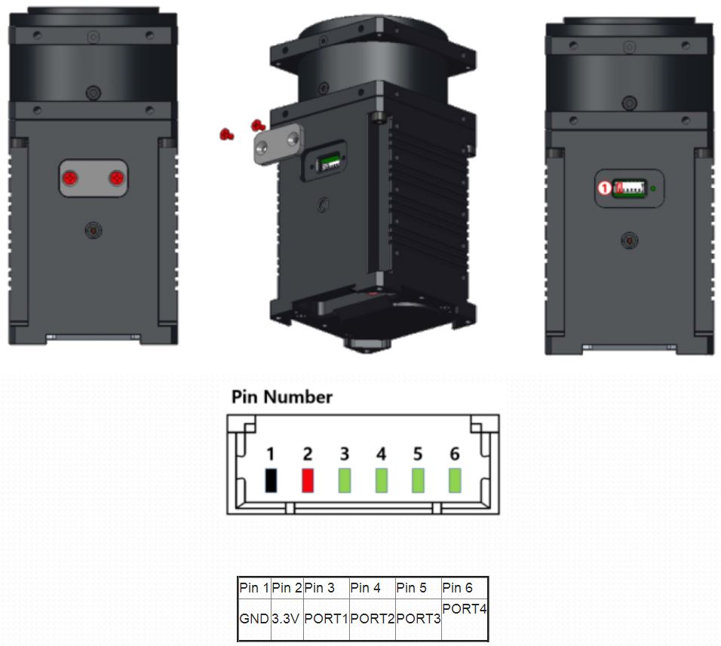
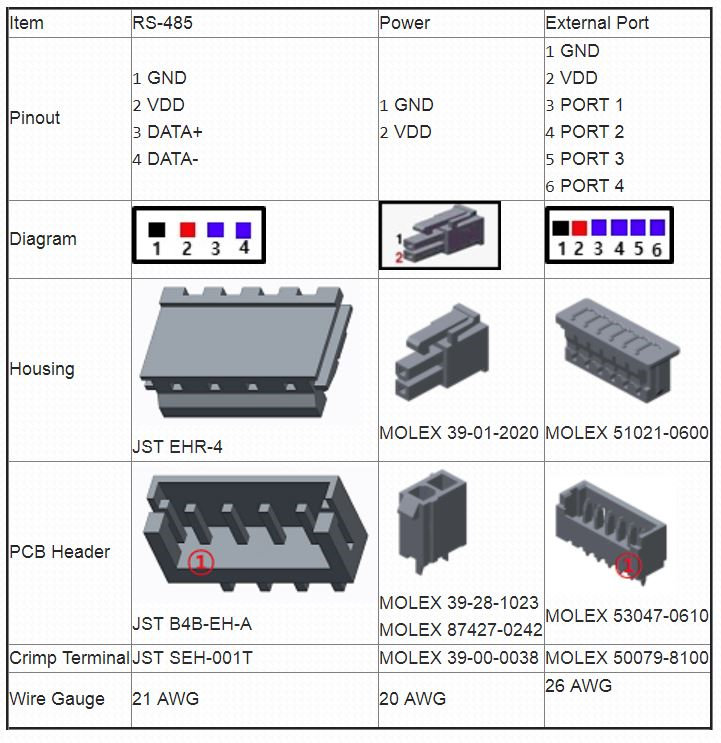
Ces actuateurs profitent d'un design réévalué, en particulier au niveau des connecteurs JST. La table de contrôle de ces servos entièrement programmables a également fait l'objet d'améliorations pour intégrer toutes les fonctions prises en charge par les appareils de la série X.
Réalisez l'analyse complète du servomoteur Dynamixel-P H42P-020-S300-R avec les ressources ci-dessous :
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Plus stable, plus fiable, plus précis et réactif, le servomoteur Dynamixel-P H42P-020-S300-R est un choix privilégié pour vos projets de robotique de pointe ou industrielle. Tout en conservant le meilleur de la série Dynamixel-P, il se démarque aisément par l'amélioration de nombreux paramètres.
















