Die Baureihe Dynamixel ist eine feste Größe in der Welt der Robotik. Diese vom koreanischen Anbieter Robotis entwickelten Servomotoren zählen zu den stärksten und leistungsfähigsten des Marktes.
Die Servomotoren Dynamixel werden von zahlreichen Forschungslabors und Universitäten weltweit eingesetzt. Sie wurden eigens für die Roboterkonstruktion entwickelt.
Was macht die Besonderheit der Dynamixel Servomotoren aus?
Die Dynamixel Servomotoren aus dem Hause Robotis enthalten den hochwertigen Elektromotor Maxon (Baureihen XH, MX und Pro), kombiniert mit einem ARM-Mikrocontroller.
Die Dynamixel Servomotoren aus dem Hause Robotis enthalten den hochwertigen Elektromotor Maxon (Baureihen XH, MX und Pro), kombiniert mit einem ARM-Mikrocontroller.
Ein breit gefächertes Angebot
Die Baureihe Dynamixel ist äußerst vielfältig, vom kleinen Servomotor für Roboterclubs bis hin zum leistungsfähigen Servomotor industrieller Auslegung.
Vielfältige Anwendungen
Servomotoren besitzen ein breites Einsatzspektrum in Branchen wie der Industrie, Luft- und Raumfahrt, Verteidigung, Medizintechnik und Bildung, für Anwendungen wie beispielsweise den Bau von Roboterarmen oder mobilen Plattformen, Servicerobotern usw.
Ein einfaches, umfassendes System
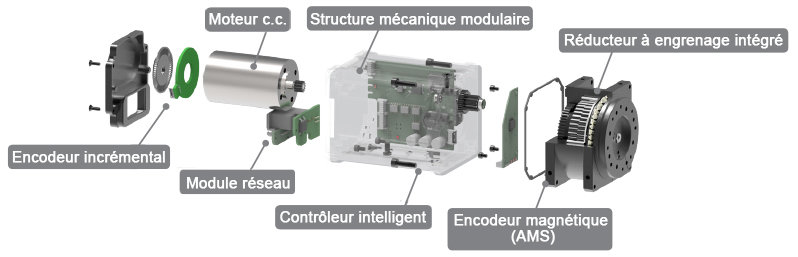
Die Servomotoren sind vollständig und funktionieren ohne Zusatzelemente (außer Stromversorgung und Kommunikation).
Modularer Aufbau
Sie sind modular aufgebaut, es stehen insbesondere zahlreiche Strukturteile zur Verfügung.
Kommunikation per Daisy Chain (saubere Montage)
Ein einziger BUS erlaubt die Steuerung aller Ihrer Servomotoren (verknüpft per Daisy Chain) sowie die Kommunikation vom Typ RS-485 oder TTL. Das reduziert die Zahl der notwendigen Kabel, was einen großen Vorteil für integrierte Projekte darstellt (Robotiker der Georgia Tech konnten so über 250 Servomotoren aneinander reihen).
Feedback
Feedback und Datensteuerung: Position, Geschwindigkeit, Temperatur, Drehmoment usw.
Geringer Stromverbrauch
Servomotoren laufen mit hoher Spannung und niedrigem Stromverbrauch, was die Stabilität der Batterie erhöht.
Kompatibilität mit zahlreichen Programmiersprachen
Kompatibilität mit zahlreichen Programmiersprachen
- Roboplus, die grafische Programmiersoftware von Robotis speziell für die Programmierung der Dynamixel Servomotoren
- SDK (mit Zugriff auf Quellcodes und Librarys für Windows, Linux und Smartphones)
- C/C++, JAVA, MATLAB, LABVIEW, ROS
PID für die Lagesteuerung und -korrektur
PID-Steuerung und Positionskorrektur bei bestimmten Baureihen: Sie geben lediglich die Werte an (P, I, D), und der Motor nutzt das PID selbständig (Baureihen Pro und PRO PLUS).
Status-LEDs für Servomotoren
Die Dynamixel Servomotoren enthalten LEDs, die Auskunft über den Status der Servomotoren geben (Überhitzung, Einsatzbereitschaft des Servos usw.).
Welche Dynamixel Servomotoren für welche Einsatzart?
Die Baureihe Dynamixel ist in Serien unterteilt, die jeweils unterschiedliche Besonderheiten aufweisen.
Nachstehend sind diese Serien im Detail beschrieben:
Baureihe AX
Die
Serie AX
umfasst die Einstiegsmodelle unter den Dynamixel Servomotoren. Sie verwenden das Protokoll TTL. Einsatz für nicht wesentliche mechanischen Funktionen Ihres Roboters.
Anwendungen: Robotikunterricht, leichte Prototypen, Motorisierung der Räder. Sie werden bei den Roboterarmen von
Trossen
eingesetzt.
AX-12A: Wegen seines günstigen Preises einer der beliebtesten Servos der gesamten Baureihe Dynamixel. Etwas leistungsfähiger als der AX-12W, allerdings wesentlich langsamer.
AX-12W: Eine Variante des AX-12A, jedoch mit weitaus höherer Drehgeschwindigkeit. Konzipiert für die Motorisierung von Rädern bei mobilen Robotern.
AX-18A: Ein AX-12A mit höherem Drehmoment. Das Ergebnis ist ein leistungsfähigerer, robusterer Servo. Der schnellste und stärkste Servo der Baureihe AX (aber auch der teuerste).
| Servomotor | Betriebsspannung [V] | Stillstandsmoment [N·m] | Stillstandsstrom [A] | Drehzahl im Leerlauf [RPM @ V] | Kommunikationsprotokoll | Abmessungen (lxHxP) [mm] | Gewicht [g] |
| AX-12A | 9-12 | 1.50 | 1.5 | 59 | TTL | 32 X 50 X 40 | 54.60 |
| AX-12W | 9-12 | 0.21 | 1.4 | 470 | TTL | 32 X 50 X 40 | 52.90 |
| AX-18A | 9-12 | 1.80 | 2.2 | 97 | TTL | 32 X 50 X 40 | 55.90 |
Baureihe MX
Die nächsthöhere Kategorie nach dem AX ist die
Baureihe MX
mit fortschrittlichen Funktionen wie einer präziseren Positionssteuerung (360°), PID-Korrektur (reduziertes Spiel) und beschleunigter Kommunikation. Diese Servomotoren sind leistungsfähiger und robuster und bieten eine bessere Kontrolle über schnelle, präzise Bewegungen.
Anwendungen: Forschungsroboter, humanoide Roboter, fortschrittlichere Prototypen. Sie kommen bei den humanoiden Robotern
Poppy
(Versionen Humanoid und Torso) und ROBOTIS-OP zum Einsatz.
| Servomotor | Betriebsspannung [V] | Stillstandsmoment [N·m] | Stillstandsstrom [A] | Drehzahl im Leerlauf [RPM @ V] | Kommunikationsprotokoll | Abmessungen (lxHxP) [mm] | Gewicht [g] |
| MX-12W | 10-14.8 | – | – | 470 | TTL | 32 X 50 X 40 | 54.60 |
| MX-28T | 10-14.8 | 2.50 | 1.4 | 55 | TTL | 35.6 X 50.6 X 35.5 | 72 |
| MX-28R | 10-14.8 | 2.5 | 1.4 | 55 | RS485 | 35.6 X 50.6 X 35.5 | 72 |
| MX-28AT | 10-14.8 | 2.50 | 1.4 | 55 | TTL | 32 X 50 X 40 | 77 |
| MX-28AR | 10-14.8 | 2.50 | 1.4 | 55 | RS485 | 32 X 50 X 40 | 77 |
| MX-64T | 10-14.8 | 6 | 4.1 | 63 | TTL | 40.2 X 61.1 X 41 | 126 |
| MX-64R | 10-14.8 | 6 | 4.1 | 63 | RS485 | 40.2 X 61.1 X 41 | 126 |
| MX-64AT | 10-14.8 | 6 | 4.1 | 63 | TTL | 40.2 X 61.1 X 41 | 135 |
| MX-64AR | 10-14.8 | 6 | 4.1 | 63 | RS485 | 40.2 X 61.1 X 41 | 135 |
| MX-106T | 10-14.8 | 8.4 | 5.2 | 45 | TTL | 40.2 X 65.1 X 46.0 | 153 |
| MX-106R | 10-14.8 | 8.4 | 5.2 | 45 | RS485 | 40.2 X 65.1 X 46.0 | 153 |
Baureihe XL
Die Baureihe XL umfasst kleine Servomotoren für den Einsatz beim schnellen Prototyping (speziell durch Kombination mit 3D-Druck), für kleine Roboter und im Bereich der Bildung.
Der XL430-W250-T besitzt dieselbe mechanische Struktur wie die Baureihen XM430 und XH430 und ist mit letzteren kompatibel. Die Servos Dynamixel XL-320 findet man beim humanoiden Roboter
Robotis Mini
, beim Poppy Ergo Jr und beim Metabot.
| Servomotor | Betriebsspannung [V] | Stillstandsmoment [N·m] | Stillstandsstrom [A] | Drehzahl im Leerlauf [RPM @ V] | Kommunikationsprotokoll | Abmessungen (lxHxP) [mm] | Gewicht [g] |
| XL-320 | 6-8.4 | 0.39 | 1.1 | 114 | TTL | 24 X 36 X 27 | 16.70 |
| XL430-W250-T | 6.5-12 | 1.50 | 1.4 | 61 | TTL | 28.5 X 46.5 X 34 | 57.20 |
| XL330-M077-T | 3,7-6 | 0.22 | 1.5 | 363 | TTL | 20 x 34 x 26 | 18 |
| XL330-M288-T | 3,7-6 | 0.52 | 1.5 | 104 | TTL | 20 x 34 x 25 | 18 |
| 2XL430-W250-T | 6,5-12 | 1.4 | 1.3 | 57 | TTL | 36 x 46,5 x 36 | 98.20 |
Baureihen XM und XH
Die Baureihen
XM
und
XH
bieten nicht unwesentliche Vorteile mit einer Rückkopplung von Drehmoment, Geschwindigkeit, Position und sogar PWM.
Die Serie XH weist eine etwas höhere Qualität auf (Motor Maxon). Trotz der niedrigeren Höchstgeschwindigkeit und des schwächeren Drehmoments gegenüber der Serie XM sind Servos der Baureihe XH robuster und bieten eine bessere Energieausbeute.
| Servomotor | Betriebsspannung [V] | Stillstandsmoment [N·m] | Stillstandsstrom [A] | Drehzahl im Leerlauf [RPM @ V] | Kommunikationsprotokoll | Abmessungen (lxHxP) [mm] | Gewicht [g] |
| XH430-V210-R | 24 | 2.60 | 0.7 | 52 | RS485 | 28.5 X 46.5 X 34 | 82 |
| XH430-V350-R | 24 | 3.30 | 0.7 | 31 | RS485 | 28.5 X 46.5 X 34 | 82 |
| XH430-W210-R | 10-14.8 | 2.50 | 1.3 | 50 | RS485 | 28.5 X 46.5 X 34 | 82 |
| XH430-W210-T | 10-14.8 | 2.50 | 1.3 | 50 | TTL | 28.5 X 46.5 X 34 | 82 |
| XH430-W350-R | 10-14.8 | 3.40 | 1.3 | 30 | RS485 | 28.5 X 46.5 X 34 | 82 |
| XH430-W350-T | 10-14.8 | 3.40 | 1.3 | 30 | TTL | 28.5 X 46.5 X 34 | 82 |
| XH540-V150-R | 24 | 6.40 | 2.4 | 60 | RS485 | 33.5 X 58.5 X 44 | 165 |
| XH540-V270-R | 24 | 9.20 | 2.4 | 34 | RS485 | 33.5 X 58.5 X 44 | 165 |
| XH540-W150-R | 10-14.8 | 7.10 | 4.9 | 70 | RS485 | 33.5 X 58.5 X 44 | 165 |
| XH540-W270-R | 10-14.8 | 9.90 | 4.9 | 39 | RS485 | 33.5 X 58.5 X 44 | 165 |
| XH540-W270-T | 10-14.8 | 9.90 | 4.9 | 39 | TTL | 33.5 X 58.5 X 44 | 165 |
| XH540-W150-T | 10-14,8 | 7.10 | 4.9 | 70 | TTL | 33,5 x 58,5 x 44 | 165 |
| Servomotor | Betriebsspannung [V] | Stillstandsmoment [N·m] | Stillstandsstrom [A] | Drehzahl im Leerlauf [RPM @ V] | Kommunikationsprotokoll | Abmessungen (lxHxP) [mm] | Gewicht [g] |
| XM430-W210-R | 10-14.8 | 3 | 2.3 | 77 | RS485 | 28.5 X 46.5 X 34 | 82 |
| XM430-W210-T | 10-14.8 | 3 | 2.3 | 77 | TTL | 28.5 X 46.5 X 34 | 82 |
| XM430-W350-R | 10-14.8 | 4.10 | 2.3 | 46 | RS485 | 28.5 X 46.5 X 34 | 82 |
| XM430-W350-T | 10-14.8 | 4.10 | 2.3 | 46 | TTL | 28.5 X 46.5 X 34 | 82 |
| XM540-W150-R | 10-14.8 | 7.30 | 4.4 | 53 | RS485 | 33.5 X 58.5 X 44 | 165 |
| XM540-W150-T | 10-14.8 | 7.30 | 4.4 | 53 | TTL | 33.5 X 58.5 X 44 | 165 |
| XM540-W270-R | 10-14.8 | 10.60 | 4.4 | 30 | RS485 | 33.5 X 58.5 X 44 | 165 |
| XM540-W270-T | 10-14.8 | 10.60 | 4.4 | 30 | TTL | 33.5 X 58.5 X 44 | 165 |
Baureihe XW
ROBOTIS präsentiert seine Dynamixel XW-Serie, eine Sammlung von Servomotoren, die speziell für die Herausforderungen feuchter Umgebungen entwickelt wurden und einen erstklassigen Schutz vor Wasser bieten (IP68). Dank dieser außergewöhnlichen Produktpalette können diese Servomotoren im Freien, unter hoher Luftfeuchtigkeit und sogar unter Wasser eingesetzt werden und eröffnen damit neue Perspektiven für robotische Anwendungen in aquatischen Umgebungen.
| Servomotor | Betriebsspannung [V] | Stillstandsmoment [N·m] | Stillstandsstrom [A] | Drehzahl im Leerlauf [RPM @ V] | Kommunikationsprotokoll | Abmessungen (lxHxP) [mm] | Gewicht [g] |
| XW430-T200-R | 10-14,8 | 2,3 | 1,3 | 53 | RS485 | 28,5 x 46,5 x 34 | 96 |
| XW430-T333-R | 10-14,8 | 3,1 | 1,3 | 31 | RS485 | 28,5 x 46,5 x 34 | 96 |
| XW540-T140-R | 10-14,8 | 6,9 | 4,9 | 72 | RS485 | 33,5 x 58,5 x 45,9 | 185 |
| XW540-T260-R | 10-14,8 | 9,5 | 4,9 | 40 | RS485 | 33,5 x 58,5 x 45,9 | 185 |
Baureihe XC
Die Dynamixel X-Serie bietet die XC-Reihe, die sich zwischen der Einsteigerreihe XL und der mittleren Leistungsreihe XM befindet. XC-Servomotoren zeichnen sich durch ihr vergleichsweise geringes Drehmoment, aber außergewöhnlich hohe Geschwindigkeit im Vergleich zu anderen Servomotoren der Dynamixel X-Serie aus. Diese Merkmale machen sie zur idealen Wahl für Anwendungen wie Radmotoren für kleine mobile Roboter oder Pan-Tilt-Türme, die mit Ultraschallsensoren verwendet werden.
| Servomotor | Betriebsspannung [V] | Stillstandsmoment [N·m] | Stillstandsstrom [A] | Drehzahl im Leerlauf [RPM @ V] | Kommunikationsprotokoll | Abmessungen (lxHxP) [mm] | Gewicht [g] |
| XC430-T150BB-T | 6,5-4,8 | 1,6 | 1,4 | 106 | TTL | 20 x 34 x 26 | 23 |
| XC430-T240BB-T | 6,5-14,8 | 1,9 | 1,4 | 70 | TTL | 28,5 x 46,5 x 34 | 65 |
| XC430-W150-T | 10-14,8 | 1,6 | 1,4 | 106 | TTL | 28,5 x 46,5 x 34 | 65 |
| 2XC430-W250-T | 6,5-14,8 | 1,9 | 1,3 | 64 | TTL | 36 x 46,5 x 36 | 102 |
| XC430-W240-T | 10-14,8 | 1,9 | 0,06 | 70 | TTL | 28,5 x 46,5 x 34 | 65 |
| XC330-M181-T | 3,7-6 | 0,6 | 1,8 A | 129 | TTL | 20 x 34 x 26 | 23 |
| XC330-M288-T | 3,7-6 | 0,93 | 1,8 A | 81 | TTL | 20 x 34 x 26 | 23 |
| XC330-T181-T | 6,5-12 | 0,76 | 0,80 A | 104 | TTL | 20 x 34 x 26 | 23 |
| XC330-T288-T | 6,5-12 | 0,92 | 0,80 A | 65 | TTL | 20 x 34 x 26 | 23 |
Baureihe XD
Die XD-Serie stellt eine verbesserte Weiterentwicklung der XH-Serie dar und bietet eine längere Lebensdauer, die bis zu zwei- oder dreimal länger sein kann. Sie repräsentiert eine der Premium-Produktreihen der Marke Dynamixel und zeichnet sich durch außergewöhnliche Leistung aus. XD-Servomotoren teilen die gleiche Bauform wie die XH- und XM-Serien, was ihre Integration in bestehende Systeme erleichtert. Durch die Wahl der XD-Serie profitieren die Benutzer von einer erhöhten Zuverlässigkeit und längerer Haltbarkeit, während sie gleichzeitig eine einfache Kompatibilität mit anderen Dynamixel-Produkten beibehalten.
| Servomotor | Betriebsspannung [V] | Stillstandsmoment [N·m] | Stillstandsstrom [A] | Drehzahl im Leerlauf [RPM @ V] | Kommunikationsprotokoll | Abmessungen (lxHxP) [mm] | Gewicht [g] |
| XD430-T210-R | 10-14,8 V | 2,5 | 1,3 | 50 | RS485 | 28,5 x 46,5 x 34 | 85 |
| XD430-T350-R | 10-14,8 V | 3,4 | 1,3 | 30 | RS485 | 28,5 x 46,5 x 34 | 85 |
| XD540-T150-R | 10-14,8 V | 7,1 | 4,9 | 70 | RS485 | 33,5 x 58,5 x 44 | 170 |
| XD540-T270-R | 10-14,8 V | 9,9 | 4,9 | 39 | RS485 | 33,5 x 58,5 x 44 | 170 |
Dynamixel P
Die Baureihe
Dynamixel P
(früher Dynamixel Pro) bietet eine unerreichte Qualität sowie herausragende Leistung und Präzision. Die Servomotoren Dynamixel Pro sind sowohl hinsichtlich Position als auch Geschwindigkeit und Drehmoment steuerbar. Dynamixel Pro Servos sind in zahlreichen Sprachen programmierbar: C#, Java, Python, Labview, Matlab…
Sie eignen sich ideal für industrielle und fortschrittliche Robotikanwendungen und werden von den meisten Robotern in den weltweiten Forschungslabors eingesetzt. Genutzt werden sie für humanoide Roboter menschlicher Größe (wie den THOR-OP), mobile Plattformen der Spitzenklasse oder Maschinenarme.
Sie verwenden das Protokoll RS-485 und arbeiten mit PID-Korrektur.
PM-Serie
hochpräziser Servomotor mit einer Auflösung von 500.000 Impulsen pro Umdrehung und bis zu 60 W Ausgangsleistung und 10 Nm Drehmoment.
PH-Serie
Ultra-Hochpräzisions-Servomotor mit einer Auflösung von 1.000.000 Pulsationen pro Umdrehung und bis zu 100 W Ausgangsleistung und 44 Nm Drehmoment.
| Model | Stillstandsmoment [N.m] | Drehzahl im Leerlauf [rpm] | Spannung | Abmessungen (mm) | Gewicht (g) | Datenblatt |
| PH54-200-S500-R | 44,7 | 33,1 | 24 | 54 x 126 x 54 | 855 | Mehr Infos |
| PH54-100-S500-R | 25,3 | 33,3 | 24 | 54 x 108 x 54 | 740 | Mehr Infos |
| PM54-060-S250-R | 10,1 | 33,1 | 24 | 54 x 126 x 54 | 855 | Mehr Infos |
| PM54-040-S250-R | 3,9 | 28,4 | 24 | 54 x 108 x 54 | 710 | Mehr Infos |
| PH42-020-S300-R | 5,1 | 32,7 | 24 | 42 x 84 x 42 | 340 | Mehr Infos |
| PM42-010-S260-R | 1,7 | 28 | 24 | 42 x 72 x 42 | 270 | Mehr Infos |