La gamme Dynamixel est une valeur sûre dans le monde la robotique. Ces servomoteurs, développés par l’entreprise coréenne Robotis , sont parmi les plus puissants et performants du marché.
Les servomoteurs Dynamixel sont utilisés par très nombreux laboratoires de recherche et universités à travers le monde. Ils ont été développés spécialement pour la conception de robots.
Ce qui fait la spécificité des servomoteurs Dynamixel
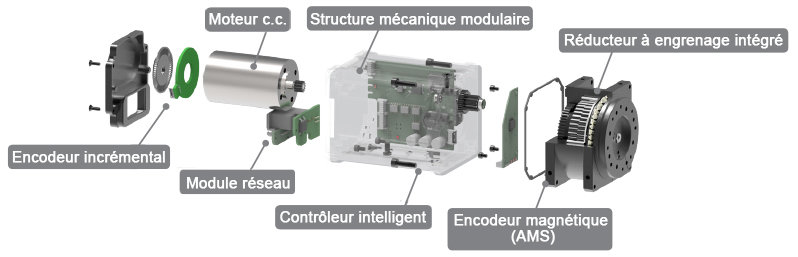
Les servomoteurs Dynamixel de Robotis contiennent en leur cœur un moteur électrique Maxon (séries XH, MX et Pro) de très haute qualité, couplé à un microcontrôleur ARM.
Très précis , les servomoteurs Dynamixel embarquent de nombreuses fonctionnalités , que nous détaillons ci-dessous.
Une gamme très diversifiée
La gamme Dynamixel est très diversifiée, du petit servomoteur qui sera utilisé dans un club de robotique, au puissant servomoteur de qualité industrielle.
Une grande variété d’applications
Les servomoteurs ont un large spectre d’utilisations comme l’industrie, l’aérospatial, la défense, les équipements médicaux, l’éducation, pour construire des bras robotiques ou des bases mobiles, des robots de service, etc.
Un système simple et tout-en-un
Ils sont tout-en-un, pas besoin d’élément extérieurs pour les faire fonctionner, à part l’alimentation et la communication
Modularité
Ils sont modulaires, notamment grâce aux nombreuses pièces de structure existantes.
Communication en daisy-chain (des montages plus propres)
Un seul BUS pour contrôler tous vos servomoteurs ( reliés en daisy-chain ), communication de type RS-485 ou TTL . Cela réduit énormément le nombre de câbles nécessaires, un avantage certain pour des projets embarqués (certains roboticiens de Georgia Tech ont pu ainsi chaîner plus de 250 servomoteurs).
Retour de données
Retour et contrôle de données : position, vitesse, température, couple, etc.
Faible consommation énergétique
Les servomoteurs fonctionnent sur une tension élevée, et une faible consommation électrique , ce qui améliore la stabilité au niveau de la batterie .
Compatibilité avec de nombreux langages de programmation
Dynamixel est compatible avec différents environnements de programmation comme :
- Roboplus, le logiciel visuel de Robotis dédié à la programmation des servomoteurs Dynamixel
- Le SDK (avec un accès aux codes sources et à des librairies pour Windows, Linux et les smartphones)
- C/C++, JAVA, MATLAB, LABVIEW, ROS
Contrôle et corrections PID
Contrôle et corrections PID sur certaines séries : indiquez seulement les valeurs (P, I, D), et le moteur utilisera le PID de façon autonome (série MX, Pro et PRO PLUS)
Des LED pour connaître les statuts des servomoteurs
Les servomoteurs Dynamixel embarquent des LED qui permettent de connaître l’état des servomoteurs (surchauffe, servomoteur prêt, etc).
Quel servomoteurs Dynamixel pour quelle type d’utilisation ?
La gamme Dynamixel se divise en séries, chacune présentant des spécificités particulières.
Nous les détaillons ci-dessous :
Série AX
La série AX regroupe des servomoteurs Dynamixel d’ entrée de gamme . Ils utilisent le protocole TTL. A utiliser pour les fonctions mécaniques non essentielles de votre robot.
Applications : apprentissage de la robotique, prototypes légers , motorisation des roues . Ils sont utilisés dans les bras robotiques Trossen .
AX-12A : l’un des plus populaires de l’ensemble de la gamme Dynamixel, dû à son prix. Un peu plus puissant que le AX-12W, mais beaucoup moins rapide.
AX-12W : une variante du AX-12A, mais avec une vitesse de rotation bien plus élevée, prévu pour la motorisation des roues des robots mobiles.
AX-18A : un AX-12A avec plus de couple, avec pour résultat un servomoteur plus plus puissant et plus endurant. Le plus rapide et le plus puissant de la gamme AX (mais aussi plus cher).
| Servomoteur | Tension de fonctionnement [V] | Couple de décrochage [N·m] | Courant de décrochage [A] | Vitesse à vide [rpm] | Protocole de communication | Dimensions (lxHxP) [mm] | Poids [g] |
| AX-12A | 9-12 | 1.50 | 1.5 | 59 | TTL | 32 X 50 X 40 | 54.60 |
| AX-12W | 9-12 | 0.21 | 1.4 | 470 | TTL | 32 X 50 X 40 | 52.90 |
| AX-18A | 9-12 | 1.80 | 2.2 | 97 | TTL | 32 X 50 X 40 | 55.90 |
Série MX
Un cran haut-dessus de la série AX, la série MX possède des fonctions avancées telles qu’un contrôle plus précis de la position, la correction PID (réduction du jeu), le contrôle de position de 360° et une communication rapide. Ils sont plus puissants et plus robustes , et offrent un meilleur contrôle des mouvements rapides et précis.
Applications : robots pour la recherche, robots humanoïdes, prototypes plus avancés. Ils sont utilisés dans les robots humanoïdes Poppy (versions Humanoid et Torso) et ROBOTIS-OP .
| Servomoteur | Tension de fonctionnement [V] | Couple de décrochage [N·m] | Courant de décrochage [A] | Vitesse à vide [rpm] | Protocole de communication | Dimensions (lxHxP) [mm] | Poids [g] |
| MX-12W | 10-14.8 | – | – | 470 | TTL | 32 X 50 X 40 | 54.60 |
| MX-28T | 10-14.8 | 2.50 | 1.4 | 55 | TTL | 35.6 X 50.6 X 35.5 | 72 |
| MX-28R | 10-14.8 | 2.5 | 1.4 | 55 | RS485 | 35.6 X 50.6 X 35.5 | 72 |
| MX-28AT | 10-14.8 | 2.50 | 1.4 | 55 | TTL | 32 X 50 X 40 | 77 |
| MX-28AR | 10-14.8 | 2.50 | 1.4 | 55 | RS485 | 32 X 50 X 40 | 77 |
| MX-64T | 10-14.8 | 6 | 4.1 | 63 | TTL | 40.2 X 61.1 X 41 | 126 |
| MX-64R | 10-14.8 | 6 | 4.1 | 63 | RS485 | 40.2 X 61.1 X 41 | 126 |
| MX-64AT | 10-14.8 | 6 | 4.1 | 63 | TTL | 40.2 X 61.1 X 41 | 135 |
| MX-64AR | 10-14.8 | 6 | 4.1 | 63 | RS485 | 40.2 X 61.1 X 41 | 135 |
| MX-106T | 10-14.8 | 8.4 | 5.2 | 45 | TTL | 40.2 X 65.1 X 46.0 | 153 |
| MX-106R | 10-14.8 | 8.4 | 5.2 | 45 | RS485 | 40.2 X 65.1 X 46.0 | 153 |
Série XL
La série XL regroupe des petits servomoteurs destinés à être utilisés pour du prototypage rapide (notamment en les combinant avec de l’impression 3D), des petits robots et dans le domaine de l’ éducation .
Le XL430-W250-T a la même structure mécanique que les XM430 et XH430 et est compatible avec ces derniers. Les Dynamixel XL-320 se trouvent dans le robot humanoïde Robotis Mini , dans le Poppy Ergo Jr ou dans le Metabot .
| Servomoteur | Tension de fonctionnement [V] | Couple de décrochage [N·m] | Courant de décrochage [A] | Vitesse à vide [rpm] | Protocole de communication | Dimensions (lxHxP) [mm] | Poids [g] |
| XL-320 | 6-8.4 | 0.39 | 1.1 | 114 | TTL | 24 X 36 X 27 | 16.70 |
| XL430-W250-T | 6.5-12 | 1.50 | 1.4 | 61 | TTL | 28.5 X 46.5 X 34 | 57.20 |
| XL330-M077-T | 3,7-6 | 0.22 | 1.5 | 363 | TTL | 20 x 34 x 26 | 18 |
| XL330-M288-T | 3,7-6 | 0.52 | 1.5 | 104 | TTL | 20 x 34 x 25 | 18 |
| 2XL430-W250-T | 6,5-12 | 1.4 | 1.3 | 57 | TTL | 36 x 46,5 x 36 | 98.20 |
Série XM et XH
Les séries XM et XH proposent des avantages non négligeables avec un asservissement de couple, vitesse, position et même PWM !
La série XH est d’une qualité légèrement supérieure (moteur Maxon ). Bien qu’ayant une vitesse et un couple maximum plus faible que la série XM, les servos de la série XH sont plus endurants et ont un meilleur rendement énergétique.
Pour plus d’informations sur cette série, nous vous invitons à lire notre test du servo Dynamixel XM-430 .
| Servomoteur | Tension de fonctionnement [V] | Couple de décrochage [N·m] | Courant de décrochage [A] | Vitesse à vide [rpm] | Protocole de communication | Dimensions (lxHxP) [mm] | Poids [g] |
| XH430-V210-R | 24 | 2.60 | 0.7 | 52 | RS485 | 28.5 X 46.5 X 34 | 82 |
| XH430-V350-R | 24 | 3.30 | 0.7 | 31 | RS485 | 28.5 X 46.5 X 34 | 82 |
| XH430-W210-R | 10-14.8 | 2.50 | 1.3 | 50 | RS485 | 28.5 X 46.5 X 34 | 82 |
| XH430-W210-T | 10-14.8 | 2.50 | 1.3 | 50 | TTL | 28.5 X 46.5 X 34 | 82 |
| XH430-W350-R | 10-14.8 | 3.40 | 1.3 | 30 | RS485 | 28.5 X 46.5 X 34 | 82 |
| XH430-W350-T | 10-14.8 | 3.40 | 1.3 | 30 | TTL | 28.5 X 46.5 X 34 | 82 |
| XH540-V150-R | 24 | 6.40 | 2.4 | 60 | RS485 | 33.5 X 58.5 X 44 | 165 |
| XH540-V270-R | 24 | 9.20 | 2.4 | 34 | RS485 | 33.5 X 58.5 X 44 | 165 |
| XH540-W150-R | 10-14.8 | 7.10 | 4.9 | 70 | RS485 | 33.5 X 58.5 X 44 | 165 |
| XH540-W270-R | 10-14.8 | 9.90 | 4.9 | 39 | RS485 | 33.5 X 58.5 X 44 | 165 |
| XH540-W270-T | 10-14.8 | 9.90 | 4.9 | 39 | TTL | 33.5 X 58.5 X 44 | 165 |
| XH540-W150-T | 10-14,8 | 7.10 | 4.9 | 70 | TTL | 33,5 x 58,5 x 44 | 165 |
| Servomoteur | Tension de fonctionnement [V] | Couple de décrochage [N·m] | Courant de décrochage [A] | Vitesse à vide [rpm] | Protocole de communication | Dimensions (lxHxP) [mm] | Poids [g] |
| XM430-W210-R | 10-14.8 | 3 | 2.3 | 77 | RS485 | 28.5 X 46.5 X 34 | 82 |
| XM430-W210-T | 10-14.8 | 3 | 2.3 | 77 | TTL | 28.5 X 46.5 X 34 | 82 |
| XM430-W350-R | 10-14.8 | 4.10 | 2.3 | 46 | RS485 | 28.5 X 46.5 X 34 | 82 |
| XM430-W350-T | 10-14.8 | 4.10 | 2.3 | 46 | TTL | 28.5 X 46.5 X 34 | 82 |
| XM540-W150-R | 10-14.8 | 7.30 | 4.4 | 53 | RS485 | 33.5 X 58.5 X 44 | 165 |
| XM540-W150-T | 10-14.8 | 7.30 | 4.4 | 53 | TTL | 33.5 X 58.5 X 44 | 165 |
| XM540-W270-R | 10-14.8 | 10.60 | 4.4 | 30 | RS485 | 33.5 X 58.5 X 44 | 165 |
| XM540-W270-T | 10-14.8 | 10.60 | 4.4 | 30 | TTL | 33.5 X 58.5 X 44 | 165 |
Série XW
ROBOTIS présente sa série Dynamixel XW, une collection de servomoteurs spécialement conçus pour faire face aux défis des environnements humides, en offrant une protection de qualité supérieure contre l’eau (IP68). Grâce à cette gamme exceptionnelle, ces servomoteurs peuvent être utilisés en extérieur, dans des conditions de forte humidité, voire même sous l’eau, ouvrant ainsi de nouvelles perspectives pour les applications robotiques dans des milieux aquatiques.
| Servomoteur | Tension de fonctionnement [V] | Couple de décrochage [N·m] | Courant de décrochage [A] | Vitesse à vide [rpm] | Protocole de communication | Dimensions (lxHxP) [mm] | Poids [g] |
| XW430-T200-R | 10 à 14,8 | 2,3 | 1,3 | 53 | RS485 | 28,5 x 46,5 x 34 | 96 |
| XW430-T333-R | 10 à 14,8 | 3,1 | 1,3 | 31 | RS485 | 28,5 x 46,5 x 34 | 96 |
| XW540-T140-R | 10 à 14,8 | 6,9 | 4,9 | 72 | RS485 | 33,5 x 58,5 x 45,9 | 185 |
| XW540-T260-R | 10 à 14,8 | 9,5 | 4,9 | 40 | RS485 | 33,5 x 58,5 x 45,9 | 185 |
Série XC
La série Dynamixel X propose la gamme XC, qui se situe entre la gamme d’entrée de gamme XL et la gamme de performance intermédiaire XM. Les servomoteurs XC se distinguent par leur couple relativement faible, mais une vitesse exceptionnellement élevée par rapport aux autres servomoteurs de la série Dynamixel X. Ces caractéristiques en font un choix idéal pour des applications telles que les moteurs de roues de petits robots mobiles ou les tourelles pan-tilt utilisées avec des capteurs ultrasons.
| Servomoteur | Tension de fonctionnement [V] | Couple de décrochage [N·m] | Courant de décrochage [A] | Vitesse à vide [rpm] | Protocole de communication | Dimensions (lxHxP) [mm] | Poids [g] |
| XC430-T150BB-T | 6,5 à 14,8 | 1,6 | 1,4 | 106 | TTL | 20 x 34 x 26 | 23 |
| XC430-T240BB-T | 6,5 à 14,8 | 1,9 | 1,4 | 70 | TTL | 28,5 x 46,5 x 34 | 65 |
| XC430-W150-T | 10 à 14,8 | 1,6 | 1,4 | 106 | TTL | 28,5 x 46,5 x 34 | 65 |
| 2XC430-W250-T | 6,5 à 14,8 | 1,9 | 1,3 | 64 | TTL | 36 x 46,5 x 36 | 102 |
| XC430-W240-T | 10 à 14,8 | 1,9 | 0,06 | 70 | TTL | 28,5 x 46,5 x 34 | 65 |
| XC330-M181-T | 3,7 à 6 | 0,6 | 1,8 A | 129 | TTL | 20 x 34 x 26 | 23 |
| XC330-M288-T | 3,7 à 6 | 0,93 | 1,8 A | 81 | TTL | 20 x 34 x 26 | 23 |
| XC330-T181-T | 6,5 à 12 | 0,76 | 0,80 A | 104 | TTL | 20 x 34 x 26 | 23 |
| XC330-T288-T | 6,5 à 12 | 0,92 | 0,80 A | 65 | TTL | 20 x 34 x 26 | 23 |
Série XD
La série XD constitue une évolution améliorée de la série XH, offrant une durée de vie plus longue, jusqu’à deux ou trois fois supérieure. Elle représente l’une des gammes haut de gamme de la marque Dynamixel, caractérisée par des performances exceptionnelles. Les servomoteurs XD partagent la même empreinte que les séries XH et XM, ce qui facilite leur intégration dans les systèmes existants. En optant pour la série XD, les utilisateurs bénéficient d’une fiabilité accrue et d’une durabilité prolongée, tout en conservant une compatibilité aisée avec les autres produits Dynamixel.
| Servomoteur | Tension de fonctionnement [V] | Couple de décrochage [N·m] | Courant de décrochage [A] | Vitesse à vide [rpm] | Protocole de communication | Dimensions (lxHxP) [mm] | Poids [g] |
| XD430-T210-R | 10 à 14,8 V | 2,5 | 1,3 | 50 | RS485 | 28,5 x 46,5 x 34 | 85 |
| XD430-T350-R | 10 à 14,8 V | 3,4 | 1,3 | 30 | RS485 | 28,5 x 46,5 x 34 | 85 |
| XD540-T150-R | 10 à 14,8 V | 7,1 | 4,9 | 70 | RS485 | 33,5 x 58,5 x 44 | 170 |
| XD540-T270-R | 10 à 14,8 V | 9,9 | 4,9 | 39 | RS485 | 33,5 x 58,5 x 44 | 170 |
Dynamixel P
La série Dynamixel-P (anciennement Dynamixel Pro Plus) offre une qualité inégalée , ainsi qu’une puissance et une précision exceptionnelle. Les servomoteurs Dynamixel P sont contrôlables en position, en vitesse et en couple. Les Dynamixel P sont programmables avec de nombreux langages : C#, Java, Python, Labview, Matlab…
Ils sont idéaux pour les applications industrielles et de robotique avancée et sont utilisés par une large majorité des robots réalisés dans les laboratoires du monde entier. Ils seront utilisés pour des robots humanoïdes à taille humaine (comme le THOR-OP), des bases mobiles avancées ou des bras manipulateurs .
Ils utilisent le protocole RS-485 et bénéficient de la correction PID.
Série PM
Ces servomoteurs haute précision offrent une résolution de 500 000 pulsations par révolution et jusqu’à 60 W de puissance de sortie et 10 Nm de couple.
Série PH
Ces servomoteurs ultra-haute précision offrent une résolution de 1 000 000 pulsations par révolution et jusqu’à 100 W de puissance de sortie et 44 Nm de couple.
| Modèle | Couple [N.m] | Vitesse sans charge [rpm] | Voltage | Dimensions (mm) | Poids (g) | Fiche technique |
| PH54-200-S500-R | 44,7 | 33,1 | 24 | 54 x 126 x 54 | 855 | Voir |
| PH54-100-S500-R | 25,3 | 33,3 | 24 | 54 x 108 x 54 | 740 | Voir |
| PM54-060-S250-R | 10,1 | 33,1 | 24 | 54 x 126 x 54 | 855 | Voir |
| PM54-040-S250-R | 3,9 | 28,4 | 24 | 54 x 108 x 54 | 710 | Voir |
| PH42-020-S300-R | 5,1 | 32,7 | 24 | 42 x 84 x 42 | 340 | Voir |
| PM42-010-S260-R | 1,7 | 28 | 24 | 42 x 72 x 42 | 270 | Voir |