Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,02 € d'éco-participation
Le servomoteur Dynamixel 2XL430-W250-T offre deux axes de contrôle pour les articulations complexes de votre création robotique. Il est compatible avec les modèles XL430, XM430 et XH430.
Le servomoteur Dynamixel 2XL430-W250-T est un servomoteur Dynamixel Robotis double axe offrant ainsi 2 degrés de liberté. Une adresse spécifique est attribuée à chaque axe, autorisant ainsi de multiples applications pour votre servomoteur. Le taux de transmission, quant à lui, reste unique.
Le modèle 2XL430-W250-T revêt toutes les fonctionnalités des servomoteurs Dynamixel de série XL. Il offre une large variétés de modes de contrôle ainsi qu'une vaste plage de feedback. Vitesse, couple, tension, trajectoire, vous pouvez prendre en main tous ces paramètres grâce à la table de contrôle, et offrir ainsi à votre création un pilotage ultra précis.
Ce servo double axe 100 % programmable est conçu avec des matériaux de haute qualité pour favoriser la dissipation thermique et vous garantir la longévité et la robustesse de votre appareil. Sa conception vous permet différentes configurations de montage, tout en limitant l'usure des câbles.

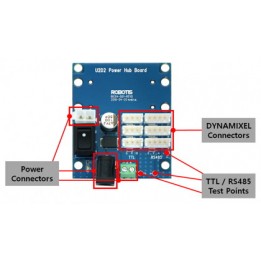
Dynamixel 2XL430-W250-T est un servomoteur à connexion TTL. Un câble robotique X3P de 18 cm vous est fourni pour connecter votre servo à son contrôleur. Toutefois, le connecteur des servos de série X a changé. Ces modèles adoptent désormais un connecteur JST plaqué or pour assurer une communication plus stable et fiable. Si vous désirez relier votre servomoteur à un contrôleur compatible avec les séries précédentes, vous devrez acquérir un câble Molex-JST.
Le servomoteur 2XL430-W250-T de Robotis est compatible avec :
Palonniers libres HN11-I101 pour l'adaptation de pièces de structures vendus séparément.
Profitez de toutes les ressources Dynamixel réunies ici pour vous permettre un contrôle absolu de votre servomoteur 2XL430-W250-T :
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Le servomoteur Dynamixel 2XL430-W250-T offre deux axes de contrôle pour les articulations complexes de votre création robotique. Il est compatible avec les modèles XL430, XM430 et XH430.