Mobile Indoor Roboter
Indoor mobile Roboter sind Maschinen, die in der Lage sind, sich in einem Innenraum zu bewegen, um eine spezifische Aufgabe zu erfüllen. Diese Roboter werden in verschiedenen Bereichen wie Logistik, Überwachung, Inspektion und Forschung eingesetzt.
AgileX Robotics hat eine breite Palette von Indoor Mobile Robotern entwickelt, darunter:
- Ranger Mini 2.0, ein omnidirektionaler UGV mit 4 Bewegungsmodi, der verschiedene Missionen drinnen und draußen bewältigen kann.
- Tracer 2.0, ein 15 cm hoher autonomer mobiler Roboter, der für die Innenraumnavigation ausgelegt ist und Lasten bis zu 100 kg tragen kann.
- Limo, ein Open-Source-Roboter, der der Entwicklung von KI- und autonomen Navigationsanwendungen gewidmet ist.
Clearpath Robotics bietet ebenfalls Indoor Mobile Roboter mit fortschrittlichen Funktionen an, darunter:
- Ridgeback, ein autonomer Handhabungsroboter, der Lasten bis zu 100 kg über eine Entfernung von 15 km mit einer maximalen Geschwindigkeit von 1 m/s tragen kann.
- Boxer, eine 75 cm lange Indoor-Roboterplattform, die eine Geschwindigkeit von 2 m/s erreichen und bis zu 100 kg tragen kann.
- Dingo, ein kompakter, leichter und einfach anpassbarer mobiler Roboter, der zwei Fahrmöglichkeiten bietet: differenziell oder omnidirektional.
TurtleBot ist ein vollständiger mobiler Roboter für Bildung und Forschung.
TurtleBot handelt sich um einen Open-Source-Indoor Mobile Roboter, der mit einer Reihe von Sensoren wie LiDAR und Kameras ausgestattet ist, um seine Umgebung zu navigieren und wahrzunehmen. Der Turtlebot kann mit einer Vielzahl von Algorithmen programmiert werden, um spezifische Aufgaben wie Kartierung oder Objekterkennung auszuführen. Es hat auch eine Plattform zur Nutzlast, um zusätzliche Ausrüstung zu tragen.
Husarion Mobile Indoor-Roboter
Die mobilen Indoor-Roboter ROSBOT von Husarion sind autonome Roboterplattformen, die für Bildung, Forschung und Prototyping entwickelt wurden.
- Der ROSBOT 3 basiert auf einem Raspberry Pi 5, einem SLAMTEC-LiDAR und einer Luxonis OAK-D Lite oder Pro Kamera und bietet eine native Integration mit ROS 2 Jazzy. Er ist sofort einsatzbereit mit vorinstallierten Navigations- und SLAM-Szenarien.
- Der ROSBOT XL ist robuster, bietet eine Nutzlast von bis zu 10 kg, leistungsstarke Antriebsräder und fortschrittliche Anpassungsmöglichkeiten (Roboterarm, Telepräsenz, autonome Navigation). Alle Modelle verfügen über vollständige Dokumentation und einsatzbereite ROS-Pakete.

















































Dieses mobile Roboterchassis für gemischte Indoor/Outdoor-Umgebungen dient als Basis für Forschung, Lehre und die Integration von humanoiden Systemen oder intelligenter Zusammenarbeit.


Der RB-ROBOUT+ ist ein kollaborativer mobiler Manipulator, der für die Automatisierung von Manipulationsaufgaben in Innenbereichen entwickelt wurde. Er kombiniert einen Universal Robots-Roboterarm mit einer omnidirektionalen Basis, die für beengte Umgebungen geeignet ist.



Der RB-ROBOUT ist ein autonomer mobiler Roboter (AMR) für den Indoor-Transport schwerer Lasten bis zu 2 Tonnen in industriellen Umgebungen wie Fabriken und Lägern.

Der RB-KAIROS ist ein autonomer mobiler Roboter (AMR) für Indoor-Anwendungen in Logistik und Transport, mit einer Nutzlast von bis zu 250 kg, omnidirektionaler Kinematik und einer ROS 2-basierten Architektur.


Der RB-THERON+ ist ein mobiler Manipulator-Roboter, der für F&E und Manipulationsaufgaben in Innenbereichen entwickelt wurde. Er eignet sich für Labore, Universitäten, Industrie-Standorte und Logistikbereiche mit begrenztem Platz.


Dieses Bunker Mini 2.0 Paket mit ROS 2 R&D Kit ist sofort einsatzbereit und ermöglicht einen schnellen Start Ihrer Navigations- und SLAM-Projekte.


Dieses einsatzbereite Paket kombiniert das AgileX Scout Mini UGV mit dem ROS-2-F&E-Kit des GR Lab, sodass Sie ohne Integrationsphase starten und direkt in die Entwicklung einsteigen können.


Dieses schlüsselfertige Paket kombiniert den AgileX Ranger Mini 3.0 UGV mit dem ROS-2-F&E-Kit des GR Lab, damit Sie ohne Integrationsaufwand starten können. Gehen Sie direkt in die Entwicklung über.

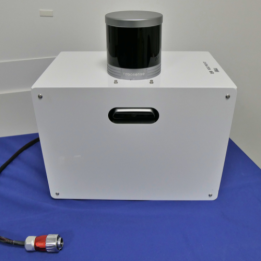
Der mobiler Indoor-Roboter Apollo 2.0 von Slamtec ist eine mittelgroße autonome Plattform, die für fortschrittliche Robotikanwendungen entwickelt wurde: autonome Navigation, Etagenlieferung, intelligente Hindernisvermeidung und Multi-Roboter-Koordination.


Der Tracer 2.0 ist eine differenzielle Roboterplattform mit zwei angetriebenen Rädern, die für anspruchsvolle Forschungsumgebungen und industrielle Anwendungen entwickelt wurde. Er vereint Geschwindigkeit, Leistung, Ausdauer und Entwicklungsoffenheit für die Anforderungen von Forschern und Ingenieuren.


Der ROSbot 3 und der ROSbot 3 PRO sind mobile Roboterplattformen für den Innenbereich, speziell entwickelt für Forschung und Ausbildung.


Der RB-KAIROS+ bietet eine umfassende und modulare Lösung zur Erweiterung der Fähigkeiten der Universal Robots-Cobots und ermöglicht eine flexible und leistungsstarke Automatisierung für industrielle Umgebungen.


Der RB-THERON ist eine modulare Lösung, die auf ROS-Architektur basiert und ideal zur Verbesserung der Effizienz von Logistikprozessen in Innenräumen geeignet ist.
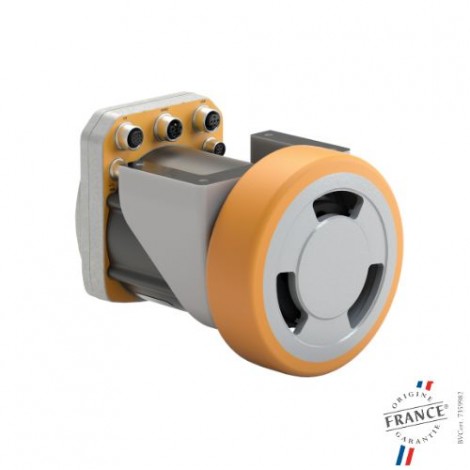

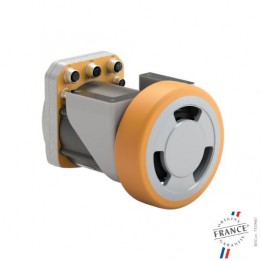
Das sicherheitsgerichtete Antriebsrad SWD 125 ist für AGV/AMR-Mobile Roboter, Logistikroboter und Forschungsplattformen konzipiert, die eine kompakte Antriebslösung mit geregelter Traktion und Konformität zu den Anforderungen der funktionalen Sicherheit benötigen.


Eine open-source und umfassende ferngesteuerte Robotikplattform, ausgestattet mit verbesserter Hardware für optimale Leistung.


Der LIMO COBOT ist eine Zusammensetzung des LIMO PRO, einer ROS-Entwicklungs- und Lernplattform, ausgestattet mit einem Mycobot 280 Roboterarm.


Entdecken Sie den ROSbot XL Mobilen Roboter von Husarion, eine autonome mobile Roboterplattform, die für Forschung und Entwicklung, schnelles Prototyping und die Erstellung maßgeschneiderter Roboter für eine Vielzahl von indoor Anwendungen konzipiert wurde.
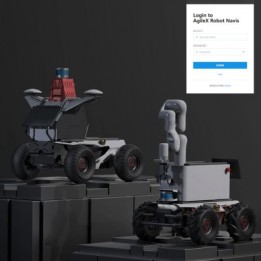
Navis ist ein autonomes Navigationssystem, das mit allen robotischen Plattformen von Agilex kompatibel ist. Es ist geeignet für halbgeschlossene und vollständig geschlossene Szenarien.


Entdecken Sie LIMO, einen mobilen Roboter, der auf einer agilen mobilen Plattform basiert. Diese evolutionäre Roboterstruktur ist auf die Entwicklung von künstlicher Intelligenz ausgerichtet. LIMO ist in 2 Versionen erhältlich: LIMO und LIMO PRO (ROS 2-kompatibel).


Die mobile Basis des TurtleBot 4 Roboters basiert auf dem iRobot® Create® 3-Lernroboter, der eine IMU, einen optischen Bodenverfolgungssensor und Rad-Encoder für eine präzise Positionierung und Lokalisierung bietet. TurtleBot 4 ist in zwei Modellen erhältlich: TurtleBot 4 Standard und TurtleBot 4 Lite


Die mobile Basis des TurtleBot 4 Roboters basiert auf dem iRobot® Create® 3-Lernroboter, der eine IMU, einen optischen Bodenverfolgungssensor und Rad-Encoder für eine präzise Positionierung und Lokalisierung bietet.


Der Ranger 4WS4WD-Roboter verfügt über eine Konfiguration mit vier angetriebenen und gelenkten Rädern, die es ihm ermöglicht, sich problemlos auf unebenem Gelände und schwierigen Oberflächen zu bewegen.


Mit seinem omnidirektionalen Drive-by-wire Chassis stellt der AgileX Ranger Mini 3.0 einen mobilen Roboter mit diversen Bewegungsmodi dar, der mit verschiedenen Missionen sowohl in Innenräumen als auch im Freien fertig wird.

Mit dem LIMO Simulationstisch können Sie testen, wie gut Ihr Roboter LIMO autonom navigieren und die Signale, die er auf seinem Weg findet, analysieren kann.