Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
La RoboSense AC2 est une caméra de profondeur conçue pour la perception robotique. Elle combine un LiDAR dToF solid-state, des caméras RGB stéréo et un IMU pour la manipulation robotique, la modélisation 3D et la localisation.
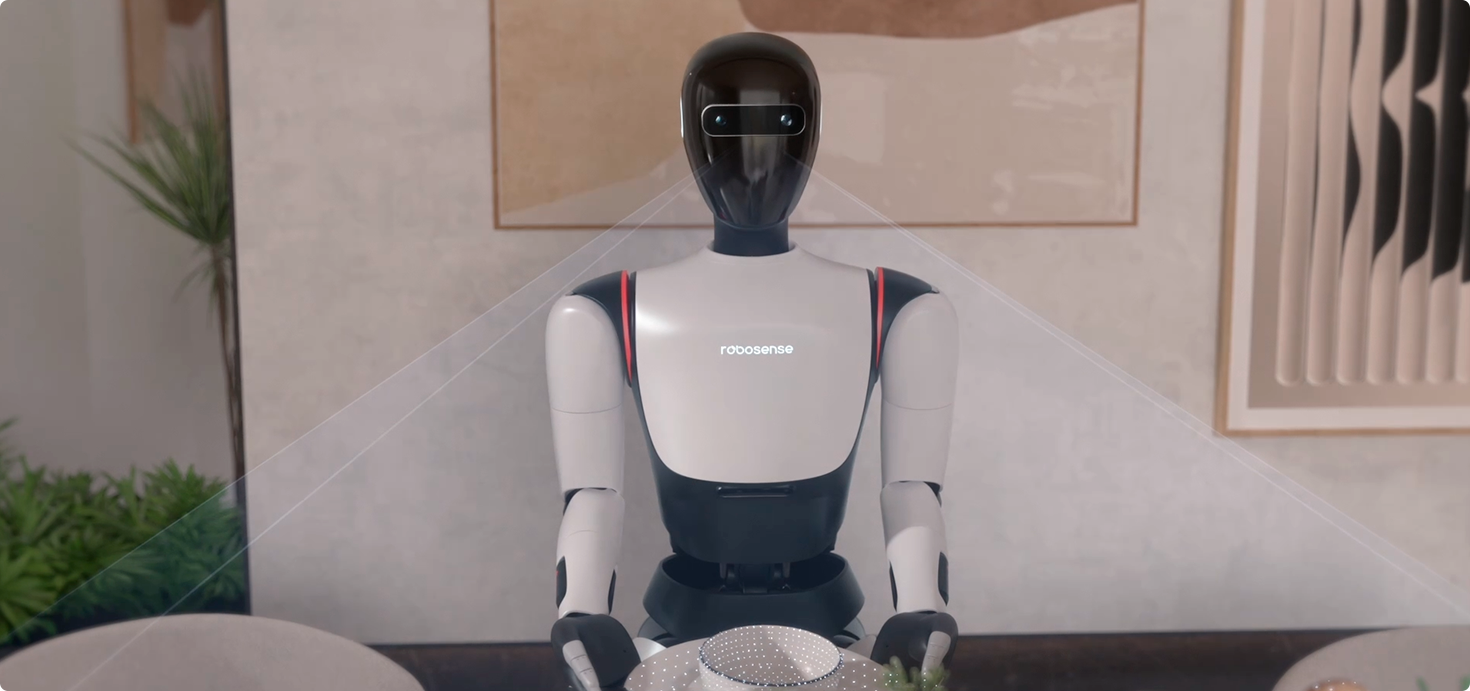

La RoboSense AC2 est une caméra de profondeur conçue pour la perception robotique. Elle combine un LiDAR dToF solid-state, des caméras RGB stéréo et un IMU pour la manipulation robotique, la modélisation 3D et la localisation.