Dynamixel Servomotoren
Die digitalen Servomotoren von Dynamixel können in vielen verschiedenen Robotern verwendet werden, vom Kleinsten, bis zum Stärksten. Die intelligent integrierte Steuerung revolutioniert die Steuerung der Servomotoren.
Eine Reihe von Produkten mit besonderen Besonderheiten:
- XL-Serie: kleine Servomotoren für den Einsatz im Rapid Prototyping, bei kleinen Robotern und im Bildungsbereich.
- AX-Serie: Einstiegs-Servomotoren, die für die nicht wesentlichen mechanischen Funktionen Ihres Roboters eingesetzt werden sollen.
- MX-Serie: Eine Stufe über der AX-Serie bietet diese Serie erweiterte Funktionen mit präziserer Bewegungssteuerung. Sie werden für Suchroboter und humanoide Roboter eingesetzt.
- X-Serie: Reihe von effizienteren und widerstandsfähigeren Servomotoren, von klein bis mittel, durch wasserdichte Servos oder einen Servomotor mit zwei Freiheitsgraden.













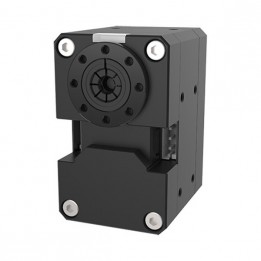























Der DYNAMIXEL XM335-T323-T Servomotor ist ein kompakter Aktuator, der speziell für robotische Finger entwickelt wurde.




/!\ WIRD OHNE SCHRAUBEN VERKAUFT /!\
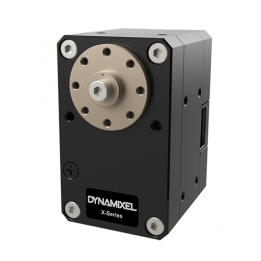
Mit einem hohen Drehmoment und zahlreichen Steuermöglichkeiten ist der Servomotor Dynamixel XM540-W270-T mit TTL-Kommunikation ein Gerät erster Wahl für Ihre mobilen Geländeroboter und Ihre leistungsstärksten Kreationen.


Der Dynamixel XC430-T240BB-T Servomotor ist eine robuste robotische Komponente, die zahlreiche Betriebsmodi bietet, einfach zu montieren ist und dank reduzierter Stromstärke eine optimierte Energieeffizienz gewährleistet.


Der Dynamixel XC430-T150BB-T Servomotor ist ein robustes robotisches Gerät, das eine Vielzahl von Betriebsmodi, eine einfache Montagestruktur und eine Energieeinsparung durch Stromreduzierung bietet.
Die neue Serie XD der Servomotoren Dynamixel hat jetzt eine lange nutzbare Version der Servomotoren XH im Angebot.
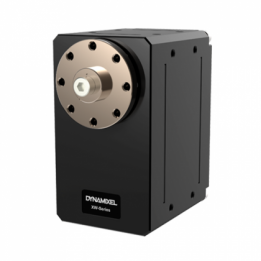
Der Servomotor Dynamixel XD540-T150-R kombiniert die Vorteile der programmierbaren All-In-One-Servomotoren von Robotis und besitzt gleichzeitig so robuste und haltbare Strukturen und Getriebe wie niemals zuvor.
Der Servomotor Dynamixel XD430-T350-R setzt auf Nutzungsdauer und ist jetzt mit einem immer noch genauso leistungsstarken Servomotor erhältlich, der 100 % programmierbar, aber dreimal belastbarer und robuster ist!
Entdecken Sie das neue Modell XD430-T210-R der grossen Familie der Dynamixel Servomotoren der Serie X: Ein Leistungspaket, das den Robotis-Fans gut bekannt ist, mit einer noch besseren Robustheit und längeren Nutzungsdauer.
SKU:902-0179-000

Haben Sie schon mal daran gedacht, ein Amphibienfahrzeug zu bauen? Mit der wasserdichten Servomotor-Reihe, zu der das XW430-T333-R Modell gehört, hat Dynamixel auch an die Robotiker gedacht, die Fans von 20.000 Meilen unter dem Meer sind.

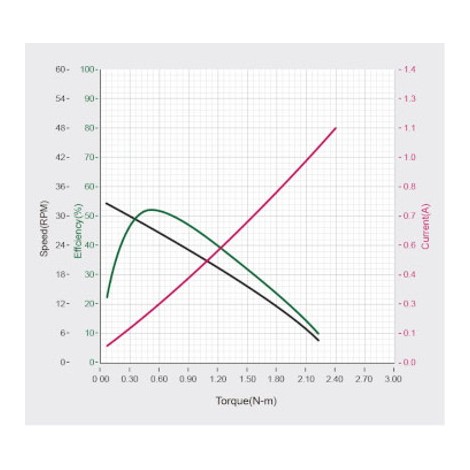
Der Dynamixel XW430-T200-R mit RS485-Verbindung vereint in sich ein 100 % wasserdichtes Gerät mit einem durchschnittlich hohen Drehmoment, das bei Bedarf für bestimmte Geschwindigkeiten sorgt.

Mit seinen erhöhten Untersetzungsverhältnis und Stillstandsmoment gehört der Dynamixel XC330-T288-T Servomotor zu den leistungsstärksten Motoren der XC Reihe.
Hersteller-Referenz: 902-0171-000

Abgerundet wird die XC330 Palette von Robotis durch Servomotoren, die immer schnell und angenehm zu steuern sind. Der Dynamixel XC330-T181-T Servomotor kann 113 Umdrehungen pro Minute erreichen!
Hersteller-Referenz: 902-0170-000

Mit dem XC330-M288-T bietet Ihnen Robotis einen programmierbaren Servomotor mit guter Geschwindigkeits-Performance - so wie man es von den Servomotoren der XC Reihe gewohnt ist. Sein Drehmoment ist jedoch das höchste der gesamten Palette.
Hersteller-Referenz: 902-0173-000

Der Dynamixel XC330-M181 Servomotor mit TTL-Verbindung entwickelt ein stärkeres Drehmoment und eine höhere Geschwindigkeit, als die Servomotoren der XL330 Reihe. Er bietet alle Steuerungsmodi, die Dynamixel-Enthusiasten bereits kennen dürften.
Hersteller-Referenz: 902-0172-000


Diese kompakte, leichte und energieeffiziente Version des Dynamixel Servomotors der professionellen Reihe bietet ein komplettes Steuerungsspektrum mit hoher Auflösung.


Mit dem Dynamixel XL330-M288-T Servomotor hat Robotis einen Servomotor der Einstiegsklasse auf den Markt gebracht, der Funktionalitäten einiger seiner fortschrittlichsten Produkte bietet.

Der Servomotor Dynamixel XW540-T140-R von Robotis erweitert eine bereits große Familie von hochauflösenden Servomotoren. Das Besondere an diesem Servomotor? Seine Wasserbeständigkeit, die es ihm erlaubt, amphibische Plattformen und mobile Stützpunkte zu 100% geländegängig auszurüsten.

Boot, Amphibienfahrzeug, Wasserscooter... Träumen Sie davon, Ihre robotischen Fähigkeiten auf dem Wasser zu testen? Der wasserdichte Servomotor Dynamixel XW540-T260-R ist Ihre Eintrittskarte zu neuen Erfahrungen.


Dynamixel ist mit einem bahnbrechenden Modell, dem 2XC430-W250-T Servomotor zurück. Ein einzelner Dynamixel-Servomotor, um gleichzeitig zwei Achsen anzutreiben. Zwei Freiheitsgrade für einen einzelnen Servomotor!


Der Servomotor Dynamixel XC430-W150-T ist dank eines höheren Drehmoments leistungsfähiger als das Modell XL430 und erlaubt schnelle, robuste Roboterkreationen.


Der Servomotor Dynamixel XC430-W240-T weist eines der leistungsfähigsten Drehmomente seiner Kategorie auf, und das bei einem niedrigen Stromverbrauch.


Für komplexe Artikulationen Ihrer Roboterkreation bietet der Servomotor Dynamixel 2XL430-W250-T zwei Steuerachsen. Er ist mit den Modellen XL430, XM430 und XH430 kompatibel.