Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Einschließlich 0,05 € für die Ökosteuer
Mit einem hohen Drehmoment und zahlreichen Steuermöglichkeiten ist der Servomotor Dynamixel XM540-W270-T mit TTL-Kommunikation ein Gerät erster Wahl für Ihre mobilen Geländeroboter und Ihre leistungsstärksten Kreationen.
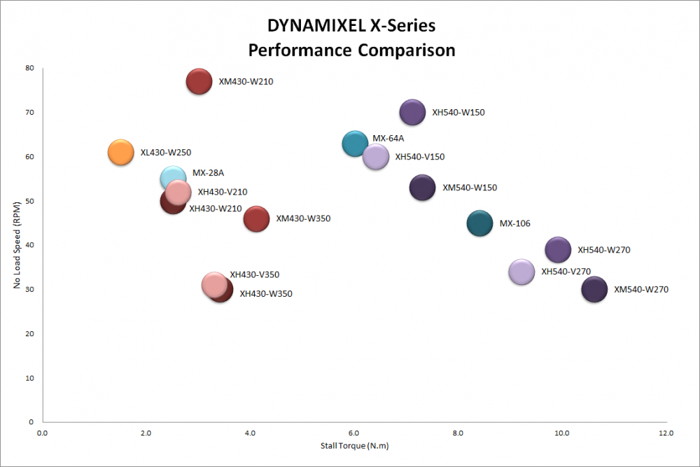
Der Servomotor XM540-W270-T zeichnet sich gegenüber anderen Modellen der Baureihe Dynamixel-X durch sein sehr starkes Sperrmoment aus: 10,6 Nm bei einem Gewicht von lediglich 165 g. Dieses Merkmal macht ihn besonders interessant für Ihre Roboterkreationen, die oft schwere Nutzlasten heben müssen oder auf schwierigem Gelände unterwegs sind.
Er weist die kompakten Abmessungen seiner Kollegen auf (weniger als 6 cm hoch, 3,35 cm breit) und arbeitet mit einer TTL-Verbindung, einem energiesparsamen Profil und einem Gehäuse, das als Kühlkörper fungiert. Ein hochwertiger Motor und ausgewählte Materialien stehen bei diesem robusten, haltbaren Servo ebenso mit auf dem Programm.
Dynamixel hat eine Baureihe von komplett programmierbaren, in jeder Hinsicht steuerbaren Servomotoren entwickelt. Sei es PWM, Position, Verbrauch, Temperatur, Geschwindigkeit ... das von diesem Servo gebotene Feedback ist wie immer extrem komplett. 6 Steuermodi stehen zur Verfügung: Stromstärke, Position, Geschwindigkeit, erweiterte Positionssteuerung, strombasierte Position und PWM. Er ist mit mehr als einem PID-Controller ausgestattet, einem häufig bei industriellen Anwendungen eingesetzten Regler.
Kurz, Ihr Servomotor passt sich an alle Umstände an, vom Prototyping über die autonome Navigation und den Roboterarm bis hin zum Wettkampf mobiler Roboter. Der Servomotor Dynamixel XM540-W270-T eignet sich sowohl für den Einsatz in der Forschung und Lehre als auch in der Entwicklung von Automatisierungslösungen in der Fertigung.

Nachstehend haben wir alles zusammengestellt, damit Sie mit Ihrem Servomotor Dynamixel XM540-W270-T optimale Ergebnisse erzielen:
Vergewissern Sie sich, dass der Dynamixel Servomotor richtig konfiguriert ist. Flashen Sie den Motor nochmal mit der Roboplus Software und konfigurieren Sie ihn erneut. Wenn das Problem weiterhin besteht, kontaktieren Sie uns.
Der Servomotor ist vermutlich schlecht montiert. Vergewissern Sie sich, das dieser gut verschraubt ist und das Servorad richtig sitzt (Punkt auf der Axe und auf der Innenseite des Servorades)
Der Dynamixel Servomotor hat sehr wahrscheinlich ein mechanisches Problem. Bitte kontaktieren Sie unseren technischen Support.
Überprüfen Sie die Stromversorgung und die Anschlüsse (zum Beispiel mit einem anderen Motor). Reinitialisieren Sie Ihren Servomotor Dynamixel. Falls das Problem weiterhin besteht, folgen Sie der Checkliste auf der Seite des Herstellers.
Das 1.0-Protokoll ist spezifisch für die Dynamixel AX- und MX-Serie. Protokoll 2.0 wurde mit der neuen X-Serie und Dynamixel Pro entwickelt. Die Steuertabellen des Protokolls 2.0 enthalten PID-Regler für eine äußerst präzise Einstellung der Servobewegungen. Die Firmware der Servos der MX-Serie kann für die Verwendung von Protokoll 2.0 aktualisiert werden. Weitere Informationen finden Sie auf den Seiten Protokoll 1.0 und Protokoll 2.0.

Mit einem hohen Drehmoment und zahlreichen Steuermöglichkeiten ist der Servomotor Dynamixel XM540-W270-T mit TTL-Kommunikation ein Gerät erster Wahl für Ihre mobilen Geländeroboter und Ihre leistungsstärksten Kreationen.