Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,05 € d'éco-participation
Avec son couple important et ses nombreuses possibilités de contrôle, le servomoteur Dynamixel XM540-W270-T à connexion TTL est une machine de choix pour vos robots mobiles tout-terrain et vos créations les plus puissantes.
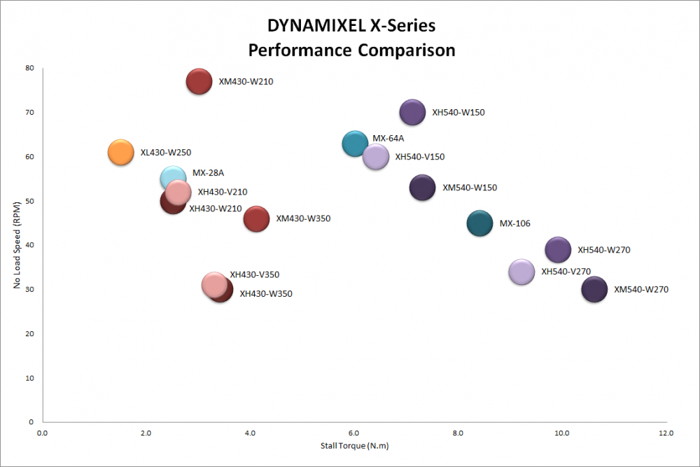
Le servomoteur XM540-W270-T se distingue des autres modèles de la série Dynamixel-X par son couple de blocage très puissant : 10,6 N.m pour un poids de seulement 165 g. Cette caractéristique le rend particulièrement intéressant pour toutes vos créations robotiques appelées à soulever de lourdes charges ou conquérir des terrains difficiles.
Il adopte les mensurations compactes de ses collègues (moins de 6 cm de haut pour 3,35 cm de large, et bénéficie d'une connexion TTL, d'un profil très économe en énergie, et d'un boîtier conçu pour favoriser la dissipation thermique. Moteur de qualité et matériaux de choix sont au programme pour ce servo robuste et durable.
Dynamixel a prévu une gamme de servomoteurs entièrement programmables et contrôlables sous toutes les coutures. PWM, position, consommation, température, vitesse… le feedback offert par ce servo est comme toujours extrêmement complet. 6 modes de contrôle sont disponibles : courant, position, vitesse, contrôle de position étendu, position basée sur le courant, et PWM. Il est équipé de plus d'un contrôleur PID, un régulateur fréquemment plébiscité dans les applications industrielles.
En somme, de quoi adapter votre servomoteur à toutes les circonstances, du prototypage à la compétition de robots mobiles, en passant par la navigation autonome ou le bras robotisé. Le servomoteur Dynamixel XM540-W270-T s'adapte aussi bien à un usage dans le milieu de l'enseignement et de la recherche, que dans le développement de solutions automatisées en usine.

Tout est réuni ci-dessous pour vous permettre d'obtenir les meilleurs résultats avec votre servomoteur Dynamixel XM540-W270-T :
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Avec son couple important et ses nombreuses possibilités de contrôle, le servomoteur Dynamixel XM540-W270-T à connexion TTL est une machine de choix pour vos robots mobiles tout-terrain et vos créations les plus puissantes.