Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,10 € d'éco-participation
Le servomoteur Dynamixel XH540-W270-R développe un couple puissant et offre de nombreuses options de contrôle aux roboticiens exigeants, amateurs de véhicules tout-terrain.
Ce servomoteur Dynamixel propose un rapport de réduction de 275:1 qui lui permet d'équiper efficacement les engins robotisés conçus pour l'exploration de terrains difficiles. Il est en effet moins rapide que le modèle XH540-W150-R, mais doté d'un couple plus puissant.
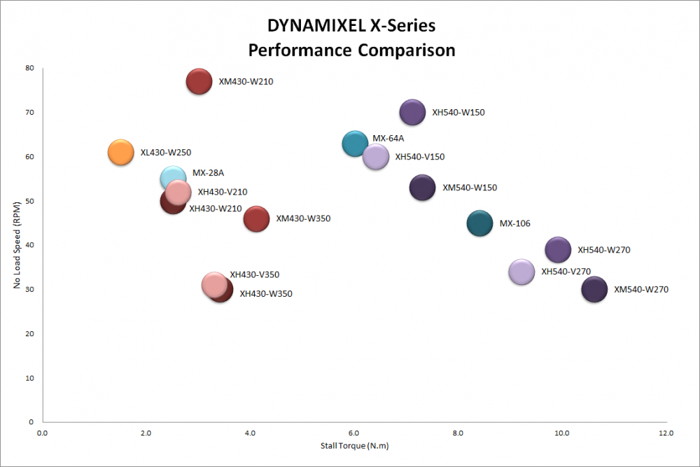
Performances des servomoteurs Dynamixel serie X
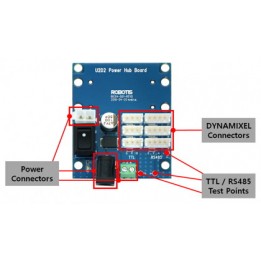
Comme toujours avec la série XH, vous bénéficiez avec ce servomoteur Robotis d'un appareil tout en un, qui ne nécessite qu'une connexion avec votre contrôleur ou un module U2D2 Dynamixel, et une alimentation, pour fonctionner immédiatement. 100 % programmable, il offre un contrôle étendu du couple, de la position, de la vitesse, ou encore du PWM, avec 6 modes de pilotage au total. Utilisez le câble JST/Molex fourni pour le connecter à son contrôleur. Le servomoteur Dynamixel XH540-W270-R dispose en effet d'un nouveau connecteur plaqué or compatible JST, bien plus fiable que le connecteur Molex des modèles précédents.
Le servomoteur Dynamixel XH540-W270-R offre de plus une haute qualité de conception, avec notamment un boîtier en métal précieux et plastique d'ingénierie qui favorise la dissipation thermique.
À l'arrière du servomoteur, vous profitez de 3 configurations différentes pour le positionnement du câble de connexion. De plus, en utilisant les supports adaptés, il vous est possible de monter votre servomoteur Dynamixel dans de nombreuses configurations, un atout particulièrement utile si vous envisagez la réalisation d'un projet robotique complexe.
Enfin, le servomoteur Dynamixel XH540-W270-R autorise le montage d'une multitude de servos en daisy-chain.

Voici toutes les ressources dont vous aurez besoin pour vous assurer de faire le meilleur usage de votre servomoteur Dynamixel XH540-W270-R.
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Le servomoteur Dynamixel XH540-W270-R développe un couple puissant et offre de nombreuses options de contrôle aux roboticiens exigeants, amateurs de véhicules tout-terrain.