Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,01 € d'éco-participation
Le servomoteur XH430-W210-R est l'un des plus complets de la gamme des servomoteurs Dynamixel : évolutif et riche de possibilités, c'est le compagnon idéal de vos plateformes robotiques les plus complexes !
Ce servomoteur XH proposé par Robotis vous ouvre de nouveaux horizons pour l'amélioration des performances de votre plateforme robotique. Haute-performance, il est doté de nombreuses fonctionnalités qui ne manqueront pas d'intéresser les roboticiens cherchant à relever de nouveaux défis :
Le contrôle du couple s'effectue par la mesure du courant et vous accédez aux données relatives à la trajectoire et l'état du mouvement. Votre servomoteur Dynamixel vous assure également une trajectoire plus fluide avec le contrôle en profilé.
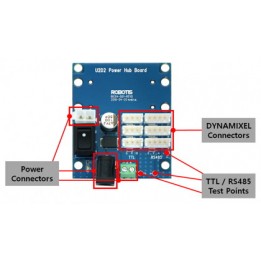
Comme toujours, vous pouvez piloter votre servomoteur Dynamixel depuis votre PC (Windows, Mac ou Linux) avec un module USB2Dynamixel ou un microcontrôleur adapté (voir ci-dessous la liste des composants nécessaires) :
Les servomoteurs XH sont le reflet des belles avancées de Robotis pour ses servomoteurs Dynamixel. Cette nouvelle série de servos offre de notables améliorations en termes de durée de vie, de couple, de dissipation thermique ou encore de format (plus compact).
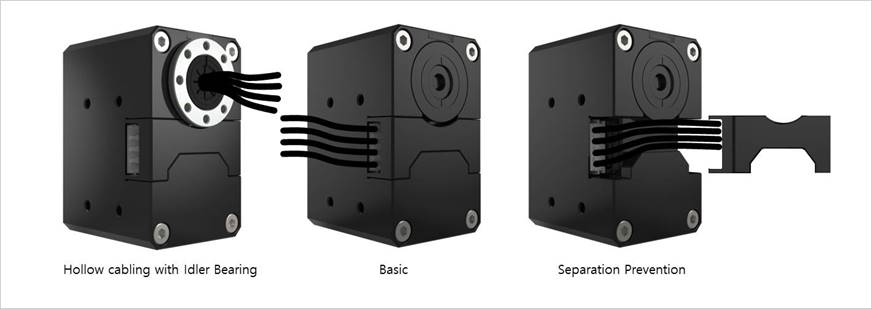
Le servomoteur XH430-W210-R est également plus économe en énergie, et sa conception lui permet de s'adapter à de plus nombreuses configurations de montage.
Chaque colis contient :

Retrouvez ci-dessous la documentation complète en lien avec votre servomoteur Robotis : manuel et codes de programmation.
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Le servomoteur XH430-W210-R est l'un des plus complets de la gamme des servomoteurs Dynamixel : évolutif et riche de possibilités, c'est le compagnon idéal de vos plateformes robotiques les plus complexes !