

Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,01 € d'éco-participation
Faites l'expérience d'un servomoteur haute précision, hautes performances, 100 % programmable avec le servomoteur Dynamixel XH430-V210-R 24 V en mode RS485.
La gamme XH des servomoteurs Dynamixel vise le haut du panier : les roboticiens les plus exigeants à la recherche d'un servomoteur intégralement asservissable avec 6 modes de fonctionnement. Vous décidez de tout : la vitesse, la position, la trajectoire, la puissance, et même la PWM, ce que les amoureux de véhicules radiocommandés apprécieront.
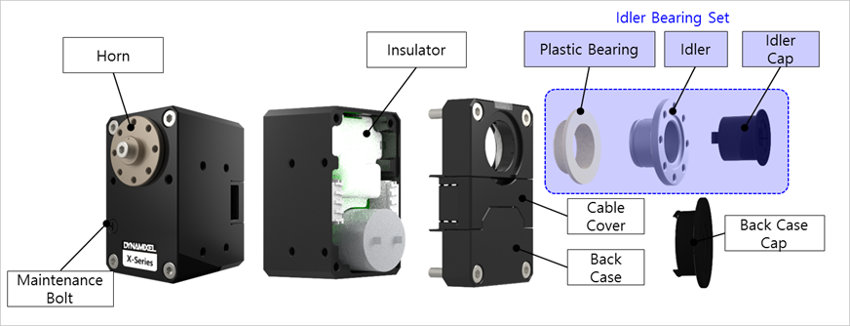
Le servomoteur Robotis XH430-V210-R vous est proposé dans un boîtier en aluminium repensé pour éviter les frottements de câble en cours de fonctionnement, que vous pouvez positionner de 3 façons différentes en fonction de votre montage.
Vous bénéficiez également d'un nombreux matériel compatible incluant cadres, supports de fixation, etc. Consultez le tableau de compatibilité ci-dessous.
Résultat : tous les types de robots mobiles et/ou articulés vous sont accessibles avec suffisamment de matériel, de composants, et d'idées !
Comme toujours, vous pouvez piloter votre servomoteur Dynamixel depuis votre PC (Windows, Mac ou Linux) avec un module USB2Dynamixel ou un microcontrôleur adapté (voir ci-dessous la liste des composants nécessaires) :
Inclus avec le servomoteur Dynamixel XH430-V210-R :

Votre servo Dynamixel XH430-V210-R est encore un mystère pour vous ? Nous avons réuni quelques liens incontournables pour lever le voile :
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Faites l'expérience d'un servomoteur haute précision, hautes performances, 100 % programmable avec le servomoteur Dynamixel XH430-V210-R 24 V en mode RS485.









































