")
")
")
Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
Including €0.38 for ecotax
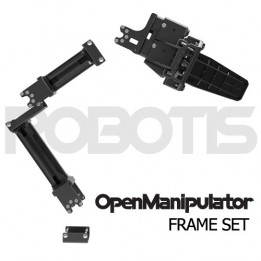
The OpenManipulator RM-X52 kit shown here includes servos. It allows you to equip your TurtleBot3 Waffle or Waffle Pi robotised platform with new functions.
This ROS compatible robotised arm is a compact version of the RM-X52 model, one of the TurtleBot3 accessories designed to extend the functions of your mobile platform. It comes in kit form with all the necessary mechanical parts and hardware to assemble. It also includes 5 compatible Dynamixel servos supporting TTL communication for operating the 5 joints.
Weighing in at 700 g, this OpenManipulator arm can handle objects up to 500 g (payload inferred from the servos). The gripper can hold on to objects from 2 to 7.5 cm wide.
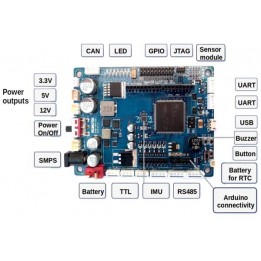
You can easily install this OpenManipulator arm on a Turtlebot3 Waffle Pi or a Turtlebot3 Waffle platform with an OpenCR controller and program it through the controller or from your PC (you will need the U2D2 Dynamixel/PC connector). It includes the source code and development environment required for setting it up.
With OpenManipulator, you enjoy the benefits of a fully open-source programming environment: you can develop your own apps, install a variety of free software options, or count on the community of inventors to get help.
")
The OpenManipulator RM-X52 kit shown here includes servos. It allows you to equip your TurtleBot3 Waffle or Waffle Pi robotised platform with new functions.