The Ouster OSDome REV8 LiDAR is suited to projects that require a combination of hemispherical coverage, close-range detection, and rich data output. It is suitable for systems that need to observe the immediate environment with a high level of vertical coverage, especially indoors or in semi-structured areas.
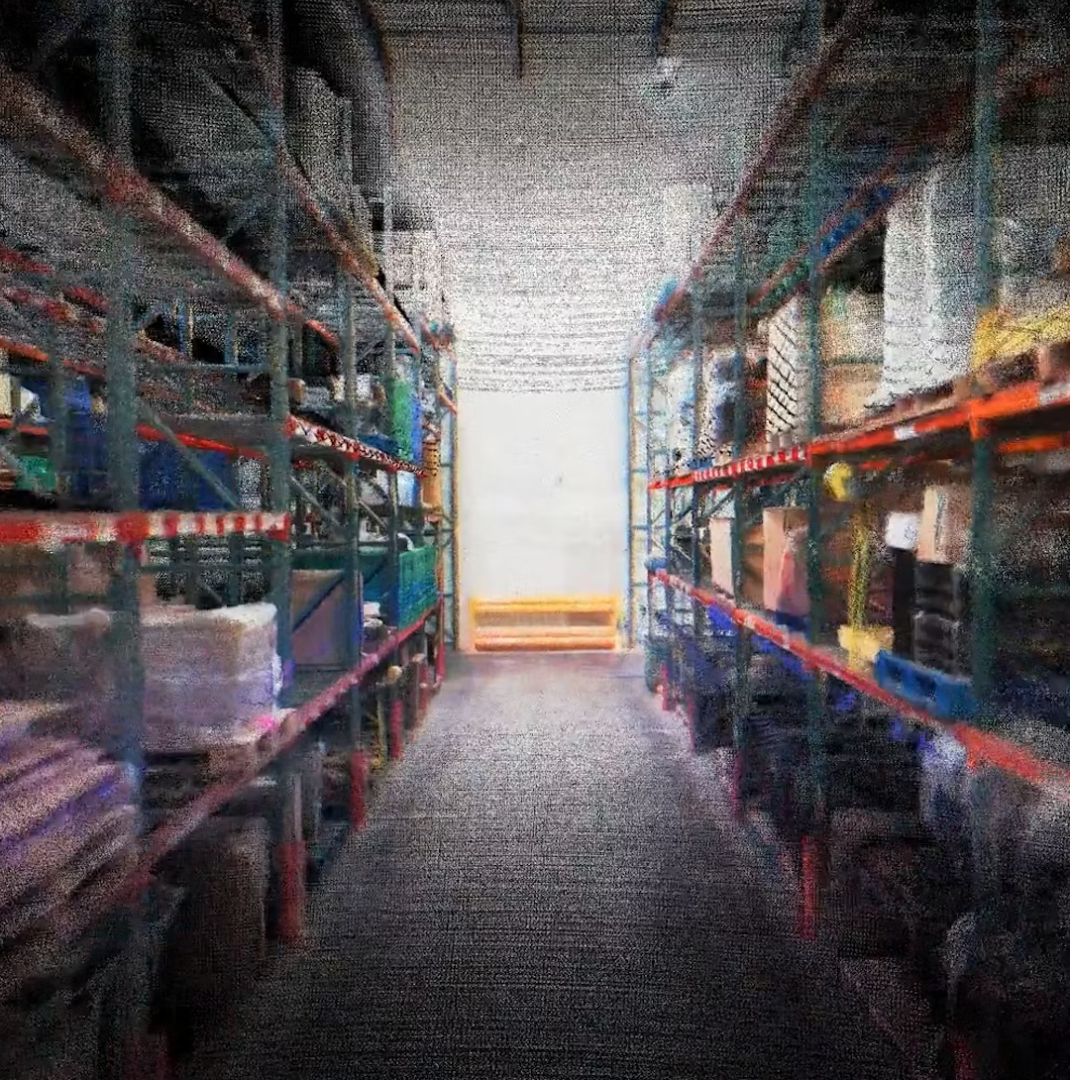
- Indoor people tracking: full coverage for passageways, halls, warehouses, or public spaces.
- Security and monitoring: presence detection, zone tracking, and system awareness.
- Smart infrastructure: 3D perception for intelligent buildings, supervision, and flow analysis.
- Mobile robots and vehicles: proximity detection, motion safety, and immediate environment awareness.
- Indoor robots: very wide coverage for local navigation, obstacle avoidance, and embedded perception.
- Research and development: integration into workflows with ROS 2, ROS, MATLAB, NVIDIA Driveworks, and Isaac Sim.
In an integration context, the OSDome REV8 features UDP over gigabit Ethernet output, an HTTPS API control interface, and functions such as the on-sensor 3D Zone Monitor, multi-sensor phase lock, azimuth masking, minimum range adjustment, return ordering, and a low-power standby mode. It can therefore serve as a working base for projects involving navigation, zone monitoring, sensor fusion, or robot vision.
Technical specifications of the Ouster OSDome REV8 LiDAR
| Range at 10% reflectivity | 20 m |
| Range at 80% reflectivity | 45 m |
| Maximum representable range | 250 m |
| Minimum range | 0.0 m (0.3 m optional, 0.5 m default) |
| Horizontal field of view | 360.0° |
| Vertical field of view | 180.0° |
| Vertical resolution | 32, 64, or 128 channels |
| Horizontal resolution | 512, 1024, 2048, or 4096 |
| Rotation rate | 5 to 40 Hz |
| Number of returns | Up to 2 |
| Maximum points per second | 10,485,760 pts/s |
| Data per point | RGB, range, signal, reflectivity, near-infrared, channel, azimuth angle, timestamp |
| Color depth | 48 bits total / 16 bits per channel |
| Dynamic range | 116 dB |
| Connection | UDP over gigabit Ethernet |
| IMU | 3-axis gyroscope + 3-axis accelerometer |
| Control interface | HTTPS API |
| Power consumption | 10 to 20 W, 15 W nominal |
| Nominal voltage | 12 VDC or 24 VDC |
| Voltage range | 9 V to 58 V DC |
| Dimensions | 87 mm diameter |
| Weight | 540 g without baseplate |
| Operating temperature | -40 °C to +85 °C |
| Protection rating | IP68 / IP69K |
| Shock resistance | 100 G |
| Vibration resistance | 10 Grms |
| Compatible software | Ouster Python SDK, C++ Driver, Ouster Studio |
| Third-party integrations | ROS2, ROS, NVIDIA Driveworks, MATLAB, NVIDIA Isaac, NVIDIA IsaacSim |
Resources for the Ouster OSDome REV8 LiDAR
FAQ about the Ouster OSDome REV8 LiDAR
What is the Ouster OSDome REV8 LiDAR used for?
The OSDome REV8 is used for embedded 3D perception in security, smart infrastructure, indoor people tracking, mobile robotics, and proximity detection projects.
What is the range of the Ouster OSDome REV8?
The sensor provides a range of 20 m on a 10% reflectivity target and a range of 45 m on an 80% reflectivity target, with a maximum representable range of 250 m.
What is the field of view of the Ouster OSDome REV8?
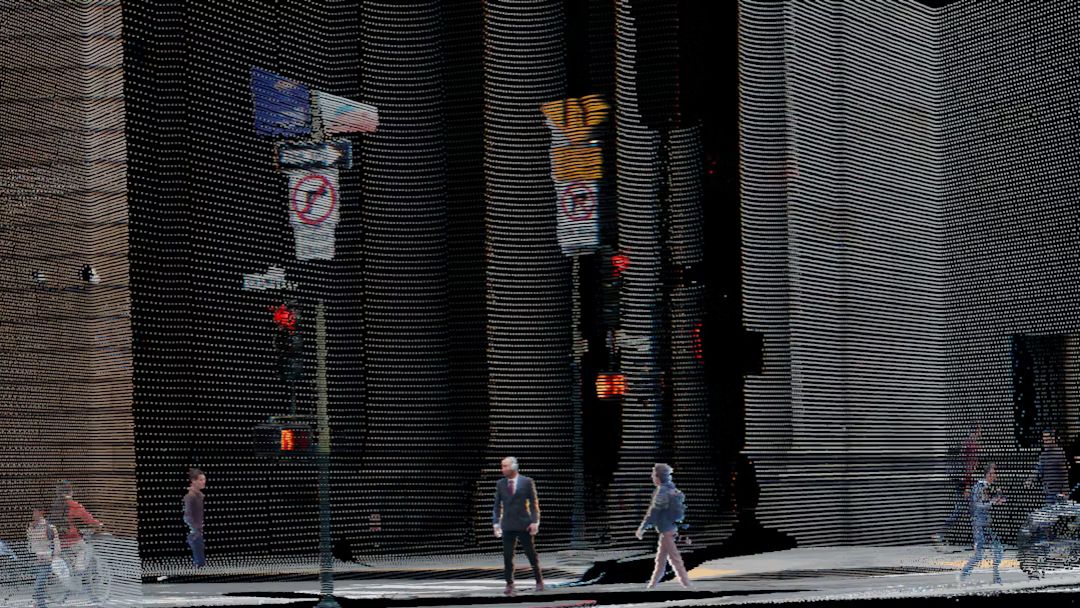
The OSDome REV8 has a 360° horizontal field of view and a 180° vertical field of view, enabling full hemispherical coverage.
Does the Ouster OSDome REV8 provide a color point cloud?
Yes, the sensor supports a native RGB-D color point cloud, useful for advanced perception, sensor fusion, and scene analysis workflows.
Is the Ouster OSDome REV8 compatible with ROS 2?
Yes, the OSDome REV8 is compatible with ROS 2, ROS, MATLAB, NVIDIA Driveworks, NVIDIA Isaac, and Isaac Sim.
")
")

")