Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
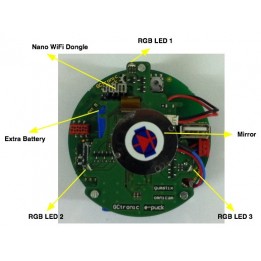
This e-puck2 is the new version of the well-known little research and education mobile robot!
This mini mobile robot for schools and labs has been updated! e-puck2 now offers a more powerful 168 MHz processor, a host of modules including a ToF distance sensor and light and proximity sensors, and totally new possibilities, for example it can now communicate via WiFi, Bluetooth 2.0, Bluetooth LE or simply using a USB connection.
Fans of the first e-puck can rest assured, because this new version has the same design and remains compatible with all the accessories used by its older brother, making swarm operations simpler. It also still has an open-source programming environment allowing you to work on embedded applications.

This e-puck2 is the new version of the well-known little research and education mobile robot!