









Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
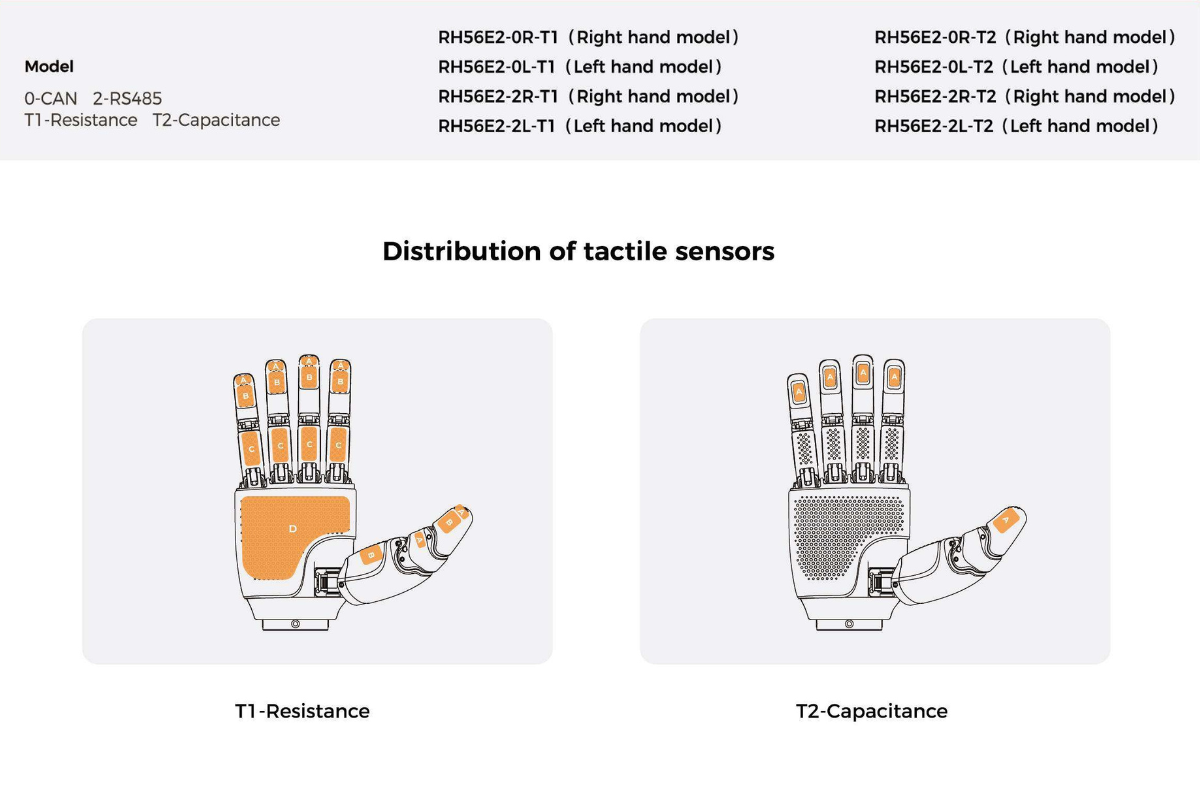
The RH56E2 is a powerful tactile robotic hand capable of applying 3 kg at the fingertip. ROS 2 compatible, it integrates with UR, Kinova or Ufactory arms and humanoid robots such as Booster T1.

The RH56E2 is a powerful tactile robotic hand capable of applying 3 kg at the fingertip. ROS 2 compatible, it integrates with UR, Kinova or Ufactory arms and humanoid robots such as Booster T1.






















