Dynamixel - XL serie
The XL series is a group of small servo motors designed for rapid prototyping (including combined with 3D printing), small robots and for use in education. The X serie also features the only 2-axis Dynamixel servo motor.









This compact, lightweight, energy-efficient version of the professional Dynamixel servos offers a full range of controls combined with a high resolution.


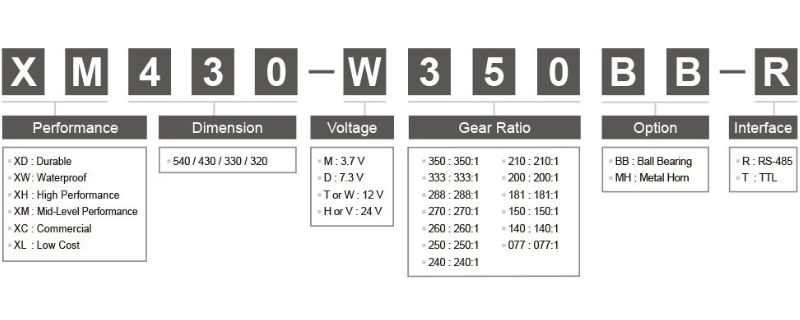
With the Dynamixel XL330-M288-T servo motor, Robotis is offering an entry-level servo with the functionalities of some of its most advanced products.


The Dynamixel 2XL430-W250-T servo motor can control two axes, for robotics creations with more complex joints. It is compatible with the XL430, XM430 and XH430 models.

The XL430-W250-T Dynamixel servo with a TTL interface falls in the family of “low cost” servo motors, but it still provides great flexibility of assembly and use, and a compact design for all your small creations.