Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
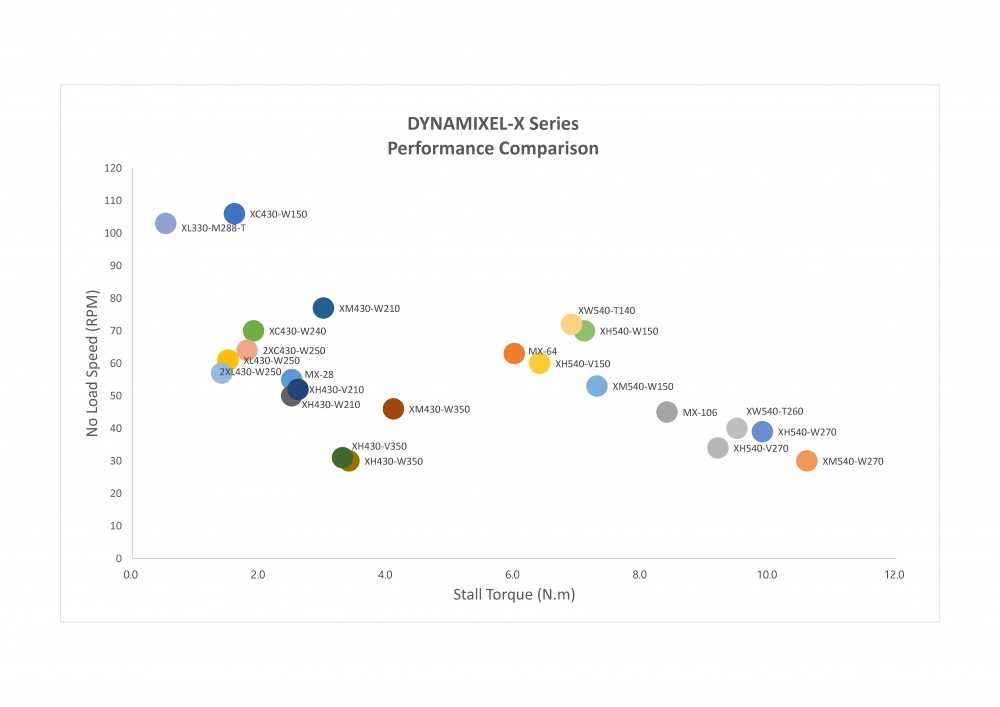
With the Dynamixel XL330-M288-T servo motor, Robotis is offering an entry-level servo with the functionalities of some of its most advanced products.
Standing 3.4 cm high, the lightweight Dynamixel XL330-M288-T paves the way for a series of economical and compact servos suitable for small applications.
Although its torque is insufficient for launching creations on an obstacle course or off-road adventure, it’s one of the fastest of all the Robotis products, with a no-load speed that can reach over 100 revolutions per minute.
While the XL330 servo is not the most powerful of its generation, it does make up for this in terms of functionalities. Of particular interest are its various control modes, including current control, current-based position control and PWM control.
In addition, it adapts to the RC protocol without any necessary modifications, so you can easily equip your small remote-controlled vehicles.
Includes:
Technical specifications:
Use these free online resources to learn everything you need to know about your Dynamixel XL330-M288-T servo motor.
Check that your Dynamixel servomotor is correctly configured. Do not hesitate to re-flash it with the ROBOTIS Software Roboplus. After re-flash remember to re-configure it. If the issue is not solved, contact us for an advanced support.
The motor is probably not well mounted. Check that you correctly mounted the horns by respecting the mark.
There is probably a mechanical issue with the Dynamixel servomotor. You can directly contact us to get more advance support.
Check your power supply and the system cabling (try with a different servomotor). You can also reset the servo. If nothing works, the best solution is to go through the Dynamixel servomotor checklist!
The 1.0 protocol is dedicated to the Dynamixel AX and MX series. Protocol 2.0 is for the X and Dynamixel Pro series. Protocol 2.0 control tables include PID controls which allow for more precise adjustment of the servo motor movements. Protocol 2.0 can be updated on MX series servo motors. You can refer to the protocol 1.0 and protocol 2.0 pages for more informations.

With the Dynamixel XL330-M288-T servo motor, Robotis is offering an entry-level servo with the functionalities of some of its most advanced products.