New

Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
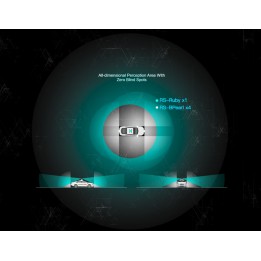
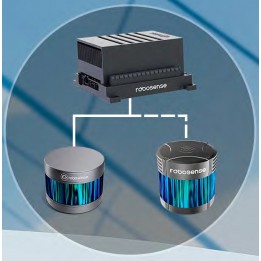
The LiDAR RoboSense Fairy is a digital LiDAR with mid-range performance for 3D perception in mobile robotics and 3D mapping. It combines high precision, a 360° field of view, and a dense point cloud in a compact form factor (< 350 g) with an Ethernet interface.
The RoboSense Fairy is designed for robotic 3D perception pipelines, with a focus on measurement accuracy and point cloud density. Key parameters for algorithmic use include 0.5 cm accuracy, a 360° × 32° FoV, and a range up to 150 m (with 80 m @ 10%).
Its angular resolution (0.25° (H) / 0.33° (V)) and throughput (up to ~1,370,000 pts/s in the 96-line version) help preserve useful geometry for obstacle detection, segmentation, and SLAM, especially for thin or low-contrast objects. The 10 Hz (adjustable) setting supports tuning the trade-off between latency, scene dynamics, and compute load.
For integration, UDP over Ethernet (100Base-TX / 100Base-T1) carries 3D coordinates, reflectivity, and a timestamp, supporting logging, test reproducibility, and use within a robotics middleware. Time synchronization (GPRMC + 1PPS, PTP, gPTP) is useful for multi-sensor setups (LiDAR + cameras + IMU) where time alignment matters. Embedded deployment is supported by < 10 W power consumption and 9–32 V input, with IP67 / IP6K9K protection and an operating range of -40°C to +60°C. The Class 1 laser (940 nm) suits shared test environments (labs, demos, industrial sites).

The LiDAR RoboSense Fairy is a digital LiDAR with mid-range performance for 3D perception in mobile robotics and 3D mapping. It combines high precision, a 360° field of view, and a dense point cloud in a compact form factor (< 350 g) with an Ethernet interface.