

















































This battery is ideal for extending the Leo Rover's runtime during long experimentation sessions, tests, or field demonstrations.


The Powerbox module for Leo Rover adds 12V and 5V outputs, an external battery socket, and allows battery charging or replacement without stopping the robot. Ideal for connecting sensors, embedded computers, and robotic arms.


The Bunker Pro 2.0 by AgileX Robotics is a rugged, all-terrain tracked robotic chassis designed for the development of specialized robotic applications. It provides a reliable mobile platform for research, inspection, exploration, or operations in challenging terrain.



The Mobile AI is the ideal solution for robotics AI projects requiring maximum flexibility, advanced manipulation, and a ready-to-use mobile station.


The Warthog Tracked is a tracked ground drone designed to operate autonomously in the most challenging terrains thanks to its rugged structure and ROS compatibility.


The LYNX M20 Pro is a wheel-legged quadruped robotic platform that combines computing power, industrial robustness, and extreme mobility. It is designed for demanding environments and advanced research missions.

The Apollo 2.0 indoor mobile robot from Slamtec is a medium-sized autonomous platform designed for advanced robotic applications such as autonomous navigation, multi-floor delivery, intelligent obstacle avoidance, and multi-robot coordination.


The Tracer 2.0 is a two-wheel differential robotic base designed for advanced research environments and industrial applications. It combines speed, power, endurance, and openness for development to meet the needs of researchers and engineers.

The X30 Pro from Deep Robotics embodies technological excellence in quadruped robotics. It is a key solution for industries requiring autonomous, safe, and reliable inspections in extreme or complex environments.

The Lite 3 is an advanced quadruped robot designed to combine power, agility, and flexibility, with a modular structure suitable for advanced robotics developments.


Lynx is a compact and rugged autonomous ground vehicle (UGV), designed for indoor and outdoor operations.


UMR (Joint Research Unit) is an advanced and versatile robotic platform. With its innovative design, integrated NAVIS navigation system, and independent hub motors, UMR adapts to various applications and excels in challenging environments.


ROSbot 3 and ROSbot 3 PRO are indoor mobile robotic platforms, specifically designed for research and education.


The A300 land drone from Clearpath Robotics is a robust mobile platform capable of carrying 100 kg, with a range of up to 12 hours and ROS 2 Jazzy compatibility for easy sensor integration.


RB-VOGUI+ is a versatile autonomous mobile manipulator, designed for indoor and outdoor transport and handling tasks, with a 200 kg payload on the platform and up to 12.5 kg with Universal Robots arms.


The RB-KAIROS+ offers a complete and modular solution to enhance the capabilities of Universal Robots cobots, allowing flexible and efficient automation for industrial environments.


The RB-SUMMIT is an autonomous mobile robot designed for indoor and outdoor R&D applications, offering exceptional versatility, flexibility, and modularity.


The RB-VOGUI is an Autonomous Mobile Robot (AMR) designed for indoor and outdoor logistics tasks, offering versatility and high mobility.


RB-THERON is a modular solution based on ROS architecture, ideal for improving the efficiency of indoor logistics processes.
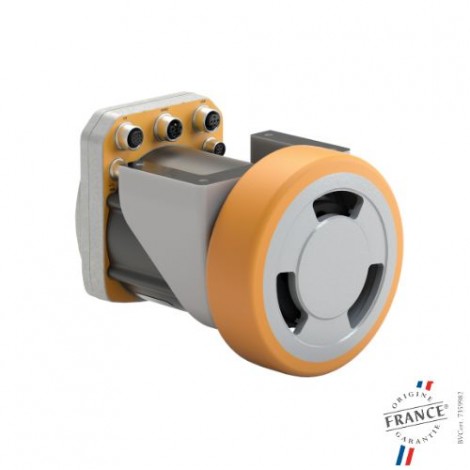

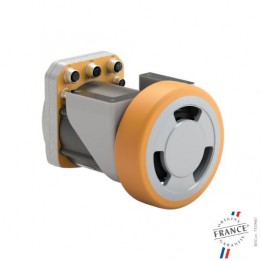
The SWD 125 safety drive wheel is designed for AGV/AMR mobile robots, logistics robots and research platforms that require a compact traction solution with controlled motion, compliant with functional safety requirements.


This wireless charging base for the Go2 EDU Plus quadruped robot allows the robot to be recharged without removing the battery.


Prepare a docking station for your Leo Rover to meet all your land robot's needs!


An open source and comprehensive remote-controlled robotic platform, featuring enhanced hardware for optimal performance.


The engineering design office at Génération Robots (GR Lab) has developed a research kit compatible with ROS2, adaptable to AgileX, Clearpath and Husarion bases.