













































The AgiBot D1 Max Pro is a quadruped robot designed for industrial applications, inspection, and mobile robotics projects requiring greater payload capacity and longer endurance.


The AgiBot D1 Ultra is a compact quadruped robot designed for research, inspection, and mobile robotics in real-world environments.


The AgiBot D1 Pro quadruped robot is a four-legged mobile platform designed for dynamic locomotion, complex terrain exploration, robotic demonstrations, and certain research or lightweight mobile robotics projects.


The Agibot A2 Ultra humanoid robot is a full-size humanoid platform designed for interaction, autonomous navigation, technology demonstrations, and certain service robotics or applied R&D projects.


The Agibot X2 Ultra humanoid robot is an advanced platform for autonomous navigation, 3D perception, human-robot interaction, and R&D projects.


The DOBOT Rover X1 is an intelligent quadruped robot designed for tracking, light transport, mobile video capture and autonomous patrolling. It combines voice control, visual tracking, obstacle detection, front / rear cameras and multiple control modes.
The NVIDIA Jetson Orin NX is a compact computing module designed for embedded artificial intelligence and Edge AI applications.


The NVIDIA Jetson AGX Orin is a high-performance computing module designed for embedded artificial intelligence and Edge AI applications.


The NVIDIA Jetson Xavier NX is a compact computing module designed for embedded artificial intelligence and Edge AI applications.


Mini PC based on Raspberry Pi Compute Module 4 with dual Gigabit Ethernet, metal case, and integrated cooling fan. Designed for embedded applications, network gateways, or industrial integration.

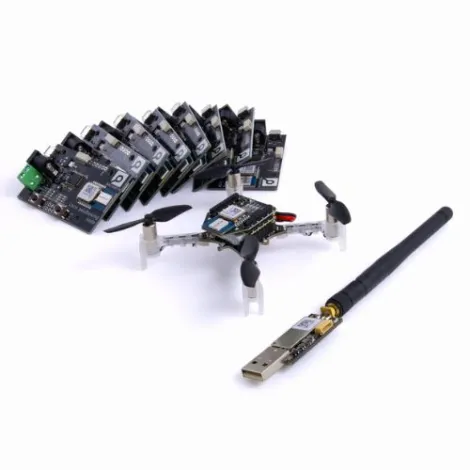
The Loco Explorer Bundle - Crazyflie 2.1+ is a complete package designed to discover indoor positioning and experiment with autonomous indoor flight. It brings together everything you need to get started with Bitcraze’s Loco Positioning system.


The ROBOTIS HX5-D20-MLT/HX5-D20-MRT hands are 5-finger 20 DOF robotic hands with tactile sensors, designed for dexterous manipulation and ROS 2 integration in research and advanced robotics.


AI WORKER is a “Physical AI” robotic platform combining dual 7-DOF arms, RGBD perception, and onboard Jetson AGX Orin computing, designed to learn tasks through demonstration and execute them in real-world conditions (assembly, inspection, logistics).


The DYNAMIXEL XM335-T323-T servo motor is a compact actuator dedicated to robotic fingers.


Create custom light patterns while flying and add visual feedback to your Crazyflies with the Crazyflie Color LED Deck.

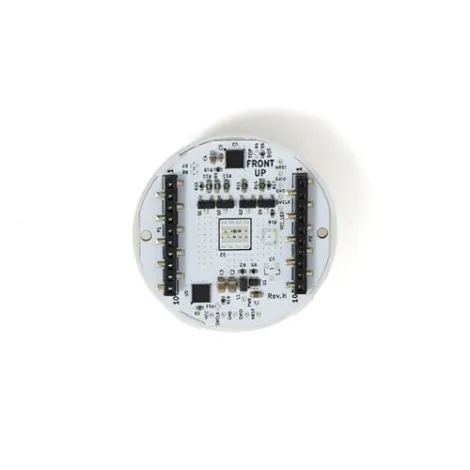
Add vibrant lighting and visual feedback to your flights with the Crazyflie Color LED Deck.


The DOBOT CRA-IP68 series includes 6-axis cobots with 5 to 20 kg payload (CR5AP, CR10AP, CR20AP) designed to automate industrial tasks in harsh environments (heavy dust, high humidity, presence of oil).


The DOBOT CRAS series includes 6-axis cobots designed to automate industrial tasks while improving safety in shared workspaces thanks to SafeSkin, a non-contact pre-detection technology that anticipates an obstacle approaching and triggers avoidance or a stop.


Robosense’s Airy LiDAR delivers precise hemispherical vision in an ultra-compact format, ideal for robotic navigation and mapping.


The DOBOT CRAF series includes 6-axis collaborative robots with a 5 to 20 kg payload (CR5AF, CR10AF, CR20AF), designed for applications where force control makes the difference: precision assembly, polishing / grinding, contact operations and advanced collaboration scenarios.


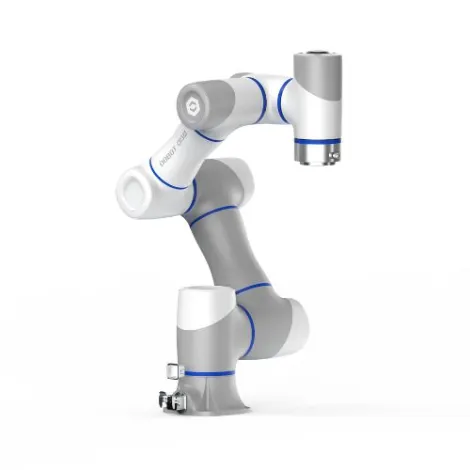
The DOBOT Nova 5 is an ultra-compact industrial robotic arm (6 axes) designed for light industry and integrations in space-constrained environments.

The DOBOT CRA series includes 6-axis collaborative robots with 3 to 20 kg payload, designed to quickly automate industrial tasks (material handling, assembly, CNC loading/unloading, welding, palletizing, etc.).


The Vision-RTK 2 Starter Kit is a ready-to-use kit to quickly evaluate a localization sensor combining RTK + vision + IMU. The goal is precise, more robust positioning when GNSS becomes unstable (urban areas, trees, covered passages).