Motor controllers
Motor controllers are electronic devices that control electric motors' movement. They are commonly used in the fields of robotics, industrial automation, and electric vehicles.
Roboteq: cutting-edge technology for optimal performance
Roboteq motor controllers are highly versatile and robust motor controllers. They offer advanced features such as speed regulation, position regulation, torque control, energy regeneration, and performance parameter monitoring. Roboteq controllers are also compatible with a wide range of motor types, including DC motors, AC motors, and stepper motors.
Sabertooth: an economical solution for robotics and automation projects
Sabertooth controllers are also popular and versatile motor controllers. They are designed to work with DC motors and offer many features, including speed regulation, direction regulation, and protection against overvoltage and short circuits. Sabertooth controllers are also known for their ease of use and reliability and are widely used in robotics and automation projects.







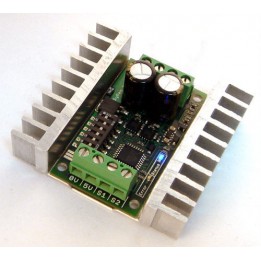




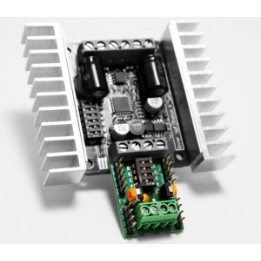




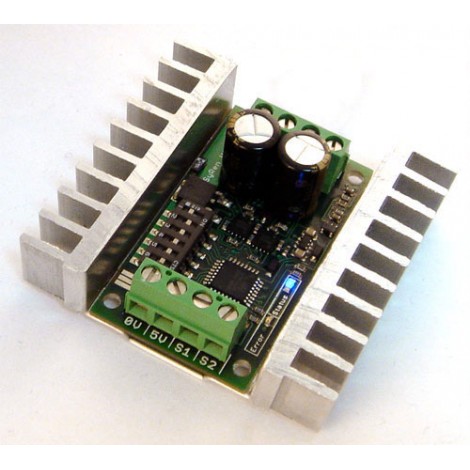
The Roboteq SBL 1360 A controller allows you to control motors up to 30A and 60V equipped with a Hall effect sensor or with no sensor thanks to a trapezoidal control mode.

The Roboteq SBL 2360 controller can drive two brushless DC motors, with or without sensors, in sinusoidal or trapezoidal mode.

This professional version of the RoboRun+ licence makes it easier to configure and program the Roboteq motor controllers.

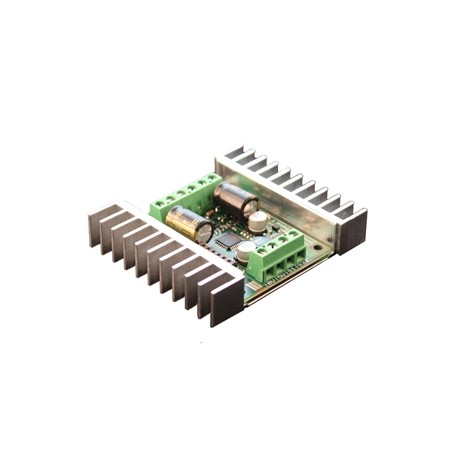
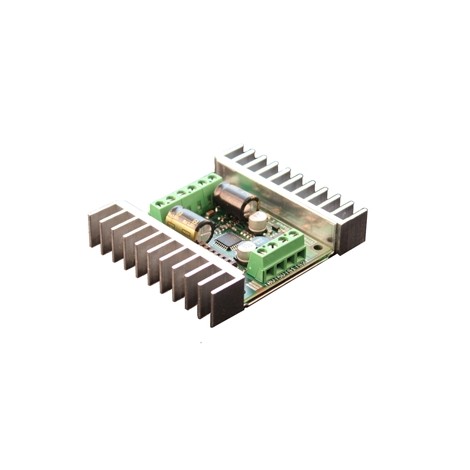
This very compact Roboteq controller allows you to control a brushed DC motor while delivering high power and output voltages.

This high-power brushed motor controller can drive up to 3 motors simultaneously with a high degree of precision.

The Roboteq SBL 1360 A controller allows you to control motors up to 30A and 60V equipped with a Hall effect sensor or with no sensor thanks to a trapezoidal control mode.

Put the SyRen 50 motor driver to the test: up to 100A peak, 4 operating modes for controlling velocity or direction, and 100% safe.
The famous SyRen regenerative motor driver is returning in a 25A version: fully secured and highly versatile, it gives you extended control over your robot’s movements.
Let your Sabertooth control and supply two DC motors, a microcontroller and a couple of servos, and your robot will reach new highs in manoeuvrability and autonomy!
The Sabertooth 2x5 motor driver can supply two DC brushed motors with up to 5A each continuously. It’s the perfect solution for small robots!

The Sabertooth family is back with its most ambitious motor driver: 2 x 60A for controlling robots up to 450 kg with the necessary sensitivity!
Precision navigation, increased autonomy and varied operating modes: the SyRen 10 motor driver is one of the most efficient for medium-sized robots.
Want to control your motors and servos with greater freedom and precision? Dimension Engineering’s Kangaroo motion controller has everything to satisfy your needs: compatible with Sabertooth and SyRen, it allows you to control position and/or speed without skidding off the track.

Sabertooth 2x32 is a dual channel motor driver capable of supplying 32A to two motors–with peak currents up to 64A. It can be operated from radio control, analogue, TTL serial or USB inputs. It uses regenerative drive and will boost your robot!


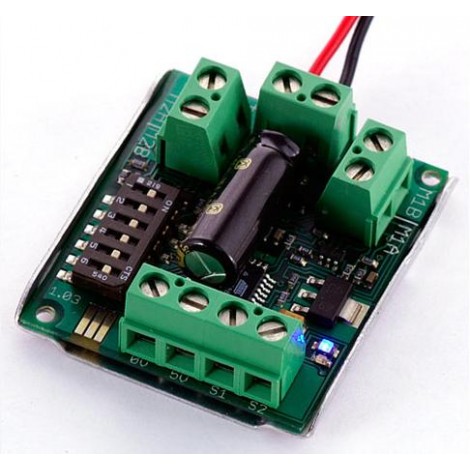
Available exclusively at Génération Robots, the Pixl board was made for using Dynamixel XL-320 motors on a Raspberry Pi designed for the Poppy Ergo Jr educational robot. Not compatible with Raspberry Pi 3B+.