Robotics arms and manipulators


































The Franka AI Companion is the ideal solution for robotics labs, AI researchers, and institutions looking to accelerate innovation.


The PiPER by AgileX Robotics is a lightweight and versatile robotic arm, offering precise and reliable control even in extreme environments, making it ideal for various applications.


The 850 collaborative arm is one of the most powerful robots with industrial-level performance.


The most compact and smallest 6-axis arm from UFactory.


A multi-axis robotic arm that perfectly perfectly balances the balance between power and size.


Discover Gen3 Lite, an affordable solution designed for education and business needs, adaptable to all skill levels.


Discover Gen3, a revolutionary robot designed for innovative research and development, adaptable to all levels of expertise with both basic and advanced control.


The Doosan Robotics H2515 robot arm is designed to improve palletisation operations. With its 1500 mm reach, 0.1 mm repeatability and a payload that can reach 25 kg, you can use it to easily move the items you need to automate part of your process.


The Doosan Robotics A0912 robot arm is fast, precise, competitive and particularly fast. With its 9 kg payload, 1200 mm reach and +/- 0.05 mm repeatability, this model is designed especially for handling and quality control.


With its 5 kg payload and 900 mm reach, the A0509 collaborative robot offers a speed and acceleration faster than the industry standard. It’s ideal for simple pick and place, boxing and line loading operations.


FR3 is a collaborative robot arm with 7 DOF, developed by FRANKA ROBOTICS. The robot designed for research and R&D allows its user to have a direct control and the possibility to program the robot, but also interface the robot with external sensors (ROS, ROS2, MoveIt! and Matlab packages available online).


With its 15 kg payload, the Doosan M1509 Robotic Arm is the perfect tool for operators having to repeatedly handle heavy loads.



The Doosan M0609 Robotic Arm is an ideal collaborative robotics tool for repetitive operations carried out in small spaces.


The most versatile in the Doosan range, this ROS robotic arm offers a reach of 1.3 metres for a 10 kg payload. It will adapt to all your automation projects, in terms of both strength and flexibility.


The pedestal for the Baxter and Sawyer robots keeps it at a defined height and also allows moving them easily.

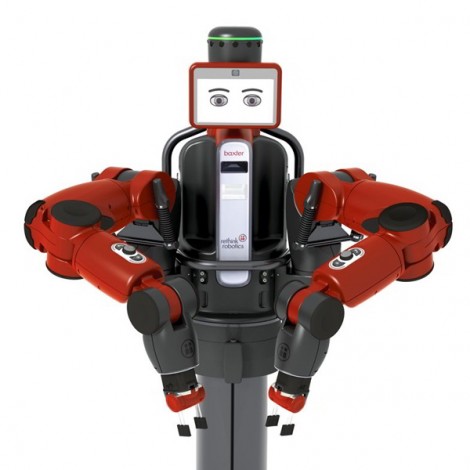
The research and education version of the famous robot Baxter, created by Rodney Brooks is an ideal base for many projects such as computer science, artificial intelligence, human-robot interaction, control, recognition and manipulation of objects, learning...