Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
Including €0.01 for ecotax
The USB2AX, an interface to control Dynamixel servos
The USB2AX plugs into a USB port and has a 3-pin to control Dynamixel servomotors from a computer. The USB2AX can talk with all of the AX Dynamixel servos such as the AX-12A, AX-12W and the AX-18A. It can also talk to the “T” versions of the MX servos such as the MX-28T, MX-64T and MX-106T.
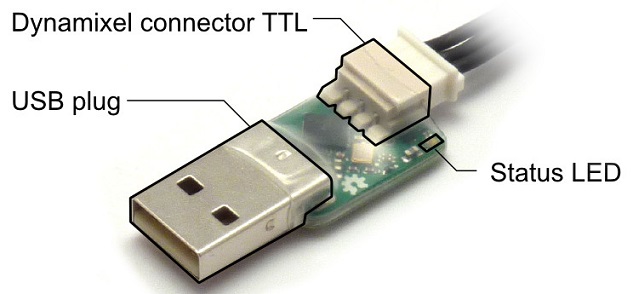
The main difference between the USB2Dynamixel and the USB2AX is that the USB2AX can talk with the Dynamixel servomotors which use a half-duplex TTL interface (3-pins connector). However the USB2AX is smaller than a USB2Dynamixel (less than 4 cm long for the USB2AX versus nearly 10 cm for the USB2Dynamixel).
USB2AX Features
Full technical specifications and plans are available for the USB2AX.
Please note that the USB2AX reserves the ID 0xFD, so it cannot be used by a Dynamixel servo on the bus. Read the Quickstart Guide to get to grips rapidly with your USB2AX.