Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
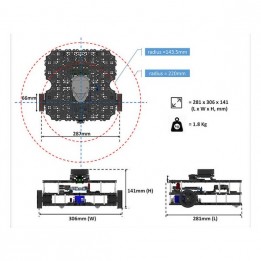
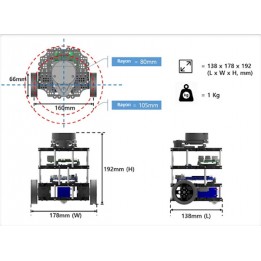
The TurtleBot 4's mobile robot is built on top of the iRobot® Create® 3 educational robot that provides an IMU, optical ground tracking sensor, and wheel encoders for precise positioning and location. TB4 comes in two models: TurtleBot 4 Standard and TurtleBot 4 Lite


 |  | |
| TurtleBot 4 Standard | TurtleBot 4 Lite | |
| Dimensions | 341 x 339 x 351 mm | 341 x 339 x 192 mm |
| Weight | 3,9 kg | 3,3 kg |
| Max. Speed | 0,31 m/s | 0,31 m/s |
| Max. Payload | 9 kg - Default 15 kg - Custom Configuration | 9 kg - Default 15 kg - Custom Configuration |
| Operating Time | 2.5 - 4.0 hrs (load dependent) | 2.5 - 4.0 hrs (load dependent) |
| Camera | OAK-D-PRO | OAK-D-LITE |
| LiDAR | RPLIDAR-A1 | RPLIDAR-A1 |
| Accessible Power & USB Ports | Yes | No |
| OLED display | Yes | No |
| Mounting Plate | Yes | No |
| Software | ROS 2 | ROS 2 |
| Computer | Raspberry Pi 4 B (4 Gb) | Raspberry Pi 4 B (4 Gb) |
Consult our FAQ or contact us at help@generationrobots.com if you have any problems with your robot.

The TurtleBot 4's mobile robot is built on top of the iRobot® Create® 3 educational robot that provides an IMU, optical ground tracking sensor, and wheel encoders for precise positioning and location. TB4 comes in two models: TurtleBot 4 Standard and TurtleBot 4 Lite