Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
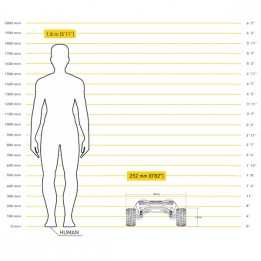
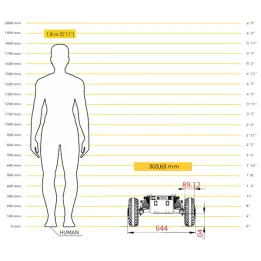
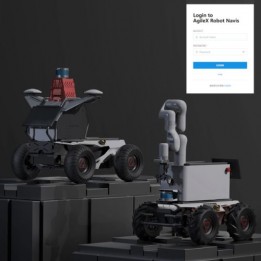
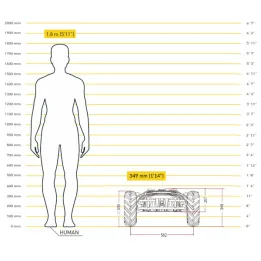
This turnkey pack combines the AgileX Ranger Mini 3.0 UGV and the GR Lab ROS 2 R&D Kit so you can start with zero integration. Go straight to development.










This turnkey pack combines the AgileX Ranger Mini 3.0 UGV and the GR Lab ROS 2 R&D Kit so you can start with zero integration. Go straight to development.