Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
This open-source controller would be the ideal choice for your TurtleBot3 robot; it is an ROS controller equipped with an ARM Cortex-M7 processor capable of accommodating your Dynamixel servos and many other modules!
The OpenCR1.0 board can be used both as an open-source robot controller (for TurtleBot3 for example) and as a microcontroller with its 32-bit processor with FPU clocked at 216 MHz. This means you have access to all the programming codes, diagrams, software and hardware designed for the TurtleBot 3 education platform.
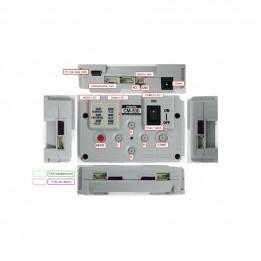
This open-source robot controller and microcontroller supports not only RS-485 and TTL communication (for Dynamixel R and T servos), but also the UART and CAN protocols. It includes a USB circuit and an 18-pin GPIO connector for working on your project.
In addition to allowing you to connect numerous peripheral modules to your ROS board, the OpenCR1.0 includes a 9-axis inertial measurement unit (3-axis gyroscope, accelerometer and magnetometer) to better control the position, rotation, altitude and speed of your mobile robot. 2 user buttons and 4 LEDs complete this already very attractive picture, along with a red/green LED output to indicate the status of the USB communication.
Need more information about your OpenCR1.0 controller? Don’t move, it’s all here!

This open-source controller would be the ideal choice for your TurtleBot3 robot; it is an ROS controller equipped with an ARM Cortex-M7 processor capable of accommodating your Dynamixel servos and many other modules!