Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
The D415 camera is another member of the small family of depth cameras developed by RealSense. It’s designed for developers in need of high perceptual accuracy, even at a distance of several metres.
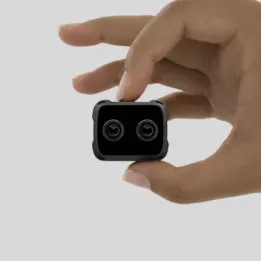
With its D415 3D camera, RealSense has opted for a small and affordable camera module that doesn’t compromise on performance:
RealSense has developed a complete series of 3D cameras with RGB sensors. Each model offers a different type of performance in terms of range, resolution and frame rate.

The D400 series includes a complete set of solutions for projects integrating use of robotic vision:
The RealSense 3D cameras boast multiple functionalities, including 3D mapping, modelling, volumetric measurement, facial recognition and autonomous navigation.
You want to get started as soon as possible with your RealSense D415 camera? These resources should help you do just that.

The D415 camera is another member of the small family of depth cameras developed by RealSense. It’s designed for developers in need of high perceptual accuracy, even at a distance of several metres.