Advanced sensors and tools for robotics
Don't let your robot move blindly! You will find here our range of advanced sensors for robotics such as high performance LiDARs that can equip autonomous cars, or highly accurate GPS navigation systems.













































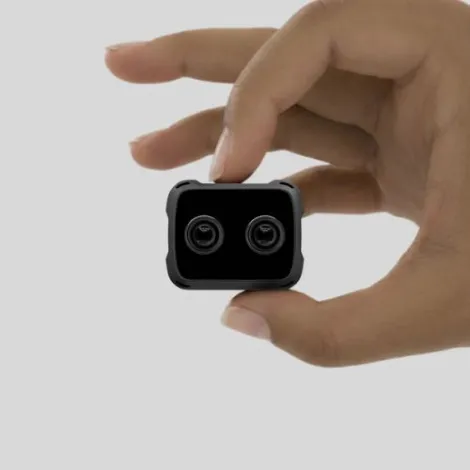
The RealSense D436 is a stereo depth camera designed for robotics, embedded vision, autonomous navigation, and 3D perception projects.


The Ouster OSDome REV8 is a hemispherical short-range imaging lidar designed for embedded 3D perception, security, smart infrastructure, indoor people tracking, and proximity detection on mobile robots and autonomous vehicles.


The Ouster OS1 Max REV8 is a long-range imaging lidar designed for embedded 3D perception, mobile robotics, autonomous vehicles, mapping, traffic and security monitoring, and demanding industrial applications.


The Ouster OS1 REV8 is a mid-range imaging lidar designed for embedded 3D perception, mobile robotics, autonomous vehicles, mapping, and smart infrastructure projects.


The Ouster OS0 REV8 is a short-range imaging lidar with an ultra-wide field of view designed for mobile robotics, embedded 3D perception, warehouse automation, and industrial applications.

The ZED X Nano Stereo Camera by Stereolabs is a short-range depth stereo camera designed for robotic manipulation, humanoids and Physical AI projects.

The RoboSense Airy Lite is a compact 360° 3D LiDAR designed for mobile robotics, mapping, and navigation applications.

The RoboSense AC2 is a depth camera designed for robotic perception. It combines a solid-state dToF LiDAR, stereo RGB cameras, and an IMU for robotic manipulation, 3D modeling, and localization.

The RoboSense EM4 is a long-range automotive-grade digital LiDAR designed for advanced perception, driver assistance, and autonomous mobility applications at L3 level and above.

The RoboSense EMX is a 192-channel automotive-grade digital LiDAR designed for advanced perception, driver assistance, and autonomous mobility applications.


Robosense’s Airy LiDAR delivers precise hemispherical vision in an ultra-compact format, ideal for robotic navigation and mapping.


The Vision-RTK 2 Starter Kit is a ready-to-use kit to quickly evaluate a localization sensor combining RTK + vision + IMU. The goal is precise, more robust positioning when GNSS becomes unstable (urban areas, trees, covered passages).

The LiDAR RoboSense Fairy is a digital LiDAR with mid-range performance for 3D perception in mobile robotics and 3D mapping.


A stereo 3D camera over Ethernet with Vision SoC V5, built-in IMU and IP65 housing, designed for demanding industrial vision and robotics applications.


A compact stereo camera powered via USB-C, with IR Pass filter, IMU and infrared projector, ideal for easily adding depth perception to your prototypes and mobile robots.


A long-range stereo camera with IR Pass filter for reliable 3D vision in demanding environments, both indoors and outdoors.


Slamtec Aurora S is a compact AI 3D perception module for mapping and localization of mobile robots in both indoor and outdoor environments.


The Xsens Sirius AHRS development kit is a robust, high-performance kit that provides accurate roll, pitch and heading data, even in the presence of strong vibrations.


The MTi-680G RTK GNSS/INS Starter Kit is a complete navigation solution, integrating an Inertial Navigation System (INS) and an integrated RTK GNSS receiver for centimeter-level positioning. Based on the proven MTi 600-series technology, it delivers robust tracking and easy integration for demanding outdoor applications.


The MTi-670G GNSS/INS Starter Kit is an all-in-one navigation solution combining an Inertial Navigation System (INS) and an internal GNSS receiver to provide accurate orientation and position data at meter-level precision. Based on the proven MTi 600-series technology, this kit is ideal for evaluating and quickly integrating the MTi-670G into your projects.

The MTi-610R is a compact and rugged Inertial Measurement Unit (IMU) offering precise 3D measurements of rate of turn, acceleration, and magnetic field.


SLAMTEC Aurora is an all-in-one 3D sensor that delivers precise localization and autonomous mapping through the fusion of LiDAR, vision, and IMU technologies.

The Slamtec Mapper M2M3 is a 360° LiDAR scanner with built-in SLAM, capable of real-time mapping and localization without any external accessories. Compact, precise, and easy to integrate, it is ideal for mobile robots and indoor/outdoor mapping applications.


High-performance GMSL2 Fakra cable (M-F), up to 10m, for reliable video transmission in demanding conditions.