Mobile robots
Mobile robotics can be a real game changer in many projects. Mobile robots are powerful tools, which autonomy can take over from humans strenuous or dangerous tasks.
What is an autonomous mobile robot?
An autonomous mobile robot is a robot that can move around in an open or closed space. It does not remain stationary in one position. The autonomous mobile robot can map its environment and navigate on its own, without being controlled by an operator.
Autonomous mobile robots do not need any external relays to operate (such as beacons). Instead, they use SLAM (Simultaneous Localization And Mapping) technology, which enables them to build a map of their environment in real time, and do some self-localization. If needed, autonomous mobile robots can also be remotely operated.
Usually, an autonomous mobile robot is made up of:
- A chassis (with motors and controller)
- An embedded computer
- A battery
- Sensors (at least a LiDAR)
- Actuators
The sensors and actuators will change depending on the tasks the robot has to perform.
Types of sensors:
- Thermal sensor
- Panoramic camera
- Gas sensor
- Motion sensor
- Microphone
- Etc
Type of actuators:
- Robotic arm
- Screen
- Speakers
- Drone
- Etc
Mobile robots: missions and applications
In which situations can mobile robotics be a real advantage? We won't list the many tasks a robot can take over from humans, there are too many. We will list the one we are familiar with at Génération Robots. For example, for inspection tasks in hazardous environments, mobile robots are essential for ensuring safety and efficiency.
Missions where a robot can be essential, or mandatory:
- Nuclear dismantling
- Space exploration (rovers, sample collection, etc)
- Heavy equipment transport (construction sites, rescue missions, scientific missions, etc.)
- Transport of mail, medication, light equipment, within a single building, a complex or a district
- Robotised cowshed cleaning
- Surveillance and preventive maintenance of sensitive sites (SEVESO sites, airports, oil & gas)
- Etc
How to choose the right mobile robot for your project?
The environment and the terrain are both major considerations, as they cannot be easily changed.
Depending on the environment and the terrain on which the robot will drive, as well as its missions, the locomotion will be different:
- Mecanum wheels ➡ allows lateral movements, suitable for warehouses and indoor navigation (Clearpath Robotics' Dingo robot type)
- All-terrain wheels ➡ for outdoor navigation, suitable for exploration missions, agriculture, etc (RR100 robot type from Generation Robots)
- Tracked ➡ outdoor navigation, on uneven terrain (potholes, small ditches, rocks, steps, etc) (Bunker Pro robot type)
- 4 legs ➡ allows robots to move on stairs or rocks (Spot robot type). Some hybrid models, such as the B2 from Unitree Robotics, have wheels at the end of their legs.
You will also need to consider the following features:
- The payload (does the robot need to carry heavy equipment?)
- Autonomy (an important factor in surveillance and security missions)
- Agility (speed and turning radius)
- The budget allocated to the project
Other factors, such as the possibility to quickly add extra addons, can also be important. Agilex mobile robots are equipped with rails that allow for quick customization.
Finally, ROS/ROS 2 compatibility is often a major factor in the choice of a mobile base, especially for research and R&D centers. All our mobile robots are ROS compatible.








































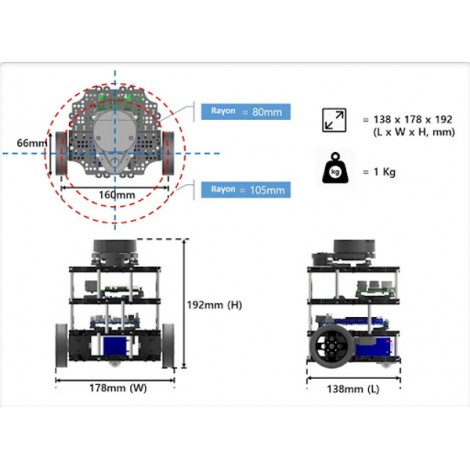
The Turtlebot3 Burger is a mobile robotics educational platform that’s lightweight, compact, cost-effective and customisable at will. It’s the perfect solution for all those looking for a fun medium to use in their robotics programming workshops, but also for apprentice robotics engineers, and for creators and designers.

This 1,800 mAh LIPO battery is the perfect choice for charging your TurtleBot 3, Robotis OP3 or DARwin-OP robot. It incorporates a PCM specially designed to protect the battery.

Do you need to make an addition to your TurtleBot3? You’ll never get caught out with the IPL-01 plate for TurtleBot Waffle!


The A01 ball caster is fully compatible with the plate of your Turtlebot3 Waffle Pi robot.

Your TurtleBot3 deserves robust and long-lasting wheels: the TB3 Wheel/Tire Set-ISW-01 is the perfect fit for your Dynamixel servos!

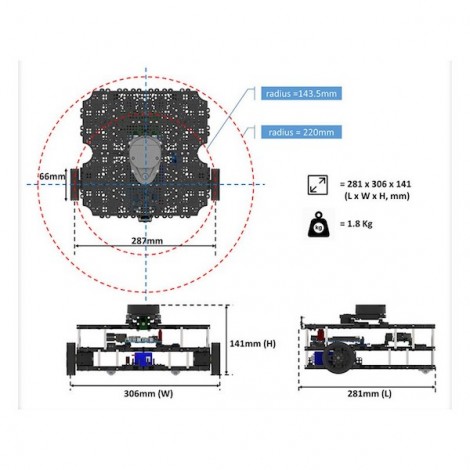
Remember the TurtleBot3 Waffle, the advanced robotics platform with the distinctive shape? Meet the TurtleBot3 Waffle Pi, a brand new mobile robot featuring a Raspberry Pi 3 and a compatible camera module!


The TurtleBot 4's mobile robot is built on top of the iRobot® Create® 3 educational robot that provides an IMU, optical ground tracking sensor, and wheel encoders for precise positioning and location. TB4 comes in two models: TurtleBot 4 Standard and TurtleBot 4 Lite


The TurtleBot 4's mobile robot is built on top of the iRobot® Create® 3 educational robot that provides an IMU, optical ground tracking sensor, and wheel encoders for precise positioning and location.


This camera mount is designed to attach a Raspberry Pi camera to a TurtleBot3 robot or OpenManipulator TurtleBot3 controller.

This battery is compatible with TurtleBot3 and Robotis OP robots and incorporates a protection system.

This set of 12 IBB-01 supports for TurtleBot Waffle will allow you to connect various devices to upgrade your mobile robotics platform!


The ICT-01 component for TurtleBot3 allows you to replace the used caterpillar parts of your robot quickly and easily. Here you go again!

In this construction kit, the small Leo Rover mobile robot bares all, from A to Z. The Leo Rover Developer Kit allows you to assemble the robot’s essential components. With internal Raspberry Pi, powerful controller and ROS-based software you’re ready to begin programming!

The LIMO simulation table tests the LIMO robot’s ability to navigate independently and analyse signals found on its journey.


Make sure you have an extra Leo Rover battery in case you need a back-up power supply for your mobile robot!

The Leo Rover is a mobile research and educational robot running on a Raspberry Pi 4 that you can customise at will thanks to a wide range of modules!


The Mobile AI is the ideal solution for robotics AI projects requiring maximum flexibility, advanced manipulation, and a ready-to-use mobile station.


The Warthog Tracked is a tracked ground drone designed to operate autonomously in the most challenging terrains thanks to its rugged structure and ROS compatibility.


The PUMA M20 Pro is a wheel-legged quadruped robotic platform that combines computing power, industrial robustness, and extreme mobility. It is designed for demanding environments and advanced research missions.

The Apollo 2.0 indoor mobile robot from Slamtec is a medium-sized autonomous platform designed for advanced robotic applications such as autonomous navigation, multi-floor delivery, intelligent obstacle avoidance, and multi-robot coordination.


The Tracer 2.0 is a two-wheel differential robotic base designed for advanced research environments and industrial applications. It combines speed, power, endurance, and openness for development to meet the needs of researchers and engineers.

The X30 from Deep Robotics embodies technological excellence in quadruped robotics. It is a key solution for industries requiring autonomous, safe, and reliable inspections in extreme or complex environments.

The Lite 3 is an advanced quadruped robot designed to combine power, agility, and flexibility, with a modular structure suitable for advanced robotics developments.


Lynx is a compact and rugged autonomous ground vehicle (UGV), designed for indoor and outdoor operations.