Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
Including €0.10 for ecotax
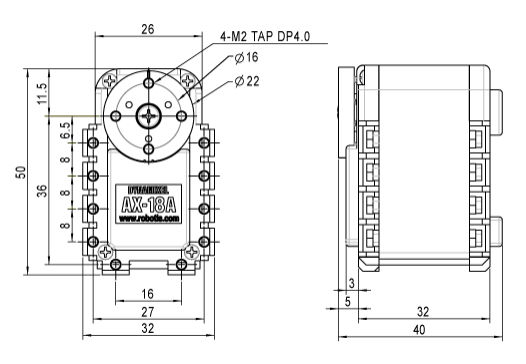
With a stall torque of 1.83 N.m and no-load rotational speed of 97 revolutions per minute at 12 V, the AX-18A servo is the most popular low-end Robotis Dynamixel servo motor. It replaces the AX-18F servo by offering a comparable performance with a much better exterior design.
Like all the Dynamixel servos, the AX-18A contains a reducer, controller and driver and communicates by digital packets. It can be programed using the RoboPlus software.
The Dynamixel AX-18A servo, more powerful than the AX-12A, also communicates with a multidrop TTL interface and is equipped with a connector for creating daisy chain connections, i.e. connecting several servos in a chain.
The Dynamixel AX-18A is used in particular in the Bioloid GP robotics kit, which is the high-performance competition robot in the Bioloid series!
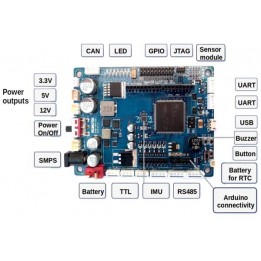
The servomotors have to be linked to a main controller (CM-700, CM-5, CM-510 or CM-530) to be commanded.
The great advantage of this Pack of 6 Dynamixel AX-18A Servos is of course its price, since you make savings equivalent to virtually one servo motor.
In order to make these savings, however, the pack contains only servos. The various accessories that usually come with the AX-18A servo need to be purchased separately, such as screws, nuts and cables.
Nonetheless, the 902-0044-001 set remains extremely advantageous since the various screws and nuts needed for assembly are staples found in any creator’s toolbox. If you’ve not bought any yet, you can easily find them on our site.
Check that your Dynamixel servomotor is correctly configured. Do not hesitate to re-flash it with the ROBOTIS Software Roboplus. After re-flash remember to re-configure it. If the issue is not solved, contact us for an advanced support.
The motor is probably not well mounted. Check that you correctly mounted the horns by respecting the mark.
There is probably a mechanical issue with the Dynamixel servomotor. You can directly contact us to get more advance support.
Check your power supply and the system cabling (try with a different servomotor). You can also reset the servo. If nothing works, the best solution is to go through the Dynamixel servomotor checklist!
The 1.0 protocol is dedicated to the Dynamixel AX and MX series. Protocol 2.0 is for the X and Dynamixel Pro series. Protocol 2.0 control tables include PID controls which allow for more precise adjustment of the servo motor movements. Protocol 2.0 can be updated on MX series servo motors. You can refer to the protocol 1.0 and protocol 2.0 pages for more informations.