Indoor mobile robots
Indoor mobile robots are machines capable of moving in an indoor space to perform a specific task. These robots are used in various fields, such as logistics, surveillance, inspection, and research.
AgileX Robotics has developed a wide range of indoor mobile robots, including:
- Ranger Mini 2.0, an omnidirectional UGV with 4 modes of movement, which can handle various missions indoors and outdoors.
- Tracer 2.0, a 15 cm tall autonomous mobile robot dedicated to indoor navigation, which can carry loads up to 150 kg.
- Limo, an open-source robot dedicated to the development of AI and autonomous navigation applications.
Clearpath Robotics also offers indoor mobile robots with advanced features, including:
- Ridgeback, an autonomous handling robot capable of carrying loads up to 100 kg over a distance of 15 km at a maximum speed of 1 m/s.
- Boxer, a 75 cm long indoor robotic platform that can reach a speed of 2 m/s and carry up to 100 kg.
- Dingo, a compact, lightweight, and easy-to-adapt mobile robot that offers two driving possibilities: differential or omnidirectional.
TurtleBot is a complete mobile robot for education and research.
TurtleBot is an open-source indoor mobile robot equipped with a set of sensors, including LiDAR and cameras, to navigate and perceive its environment. The Turtlebot can be programmed with various algorithms to perform specific tasks such as mapping or object recognition. It also has a payload platform to carry additional equipment.
Husarion Indoor Mobile Robots
ROSBOT indoor mobile robots from Husarion are autonomous robotic platforms designed for education, research, and prototyping.
- The ROSBOT 3 is based on a Raspberry Pi 5, a SLAMTEC LiDAR, and a Luxonis OAK-D Lite or Pro camera, offering native integration with ROS 2 Jazzy. It comes ready to use with preconfigured navigation and SLAM scenarios.
- The ROSBOT XL, more robust, offers up to 10 kg payload, powerful drive wheels, and advanced customization options (robotic arm, telepresence, autonomous navigation). All models come with full documentation and ready-to-use ROS packages.

















































This mobile robot chassis for mixed indoor/outdoor environments serves as a base for research, education, and the integration of humanoid systems or intelligent collaboration.


The RB-ROBOUT+ is a collaborative mobile manipulator designed to automate manipulation tasks indoors, combining an Universal Robots arm with an omnidirectional base suitable for confined spaces.



The RB-ROBOUT is an autonomous mobile robot (AMR) designed for indoor transport of heavy loads, up to 2 tonnes, in industrial environments such as factories and warehouses.

The RB-KAIROS is an autonomous mobile robot (AMR) designed for indoor logistics and transport applications, with a payload of up to 250 kg, omnidirectional kinematics and a ROS 2-based architecture.


The RB-THERON+ is a mobile manipulator robot designed for R&D and manipulation operations in indoor environments, suitable for laboratories, universities, industrial sites and logistics areas where space is limited.


This Bunker Mini 2.0 pack with ROS 2 R&D kit is ready to use and lets you quickly start your autonomous navigation and SLAM projects.


This ready-to-use pack combines the AgileX Scout Mini UGV and the GR Lab ROS 2 R&D Kit, allowing you to start without any integration phase and move straight to development.


This turnkey pack combines the AgileX Ranger Mini 3.0 UGV and the GR Lab ROS 2 R&D Kit so you can start with zero integration. Go straight to development.

The Apollo 2.0 indoor mobile robot from Slamtec is a medium-sized autonomous platform designed for advanced robotic applications such as autonomous navigation, multi-floor delivery, intelligent obstacle avoidance, and multi-robot coordination.


The Tracer 2.0 is a two-wheel differential robotic base designed for advanced research environments and industrial applications. It combines speed, power, endurance, and openness for development to meet the needs of researchers and engineers.


ROSbot 3 and ROSbot 3 PRO are indoor mobile robotic platforms, specifically designed for research and education.


The RB-KAIROS+ offers a complete and modular solution to enhance the capabilities of Universal Robots cobots, allowing flexible and efficient automation for industrial environments.


RB-THERON is a modular solution based on ROS architecture, ideal for improving the efficiency of indoor logistics processes.
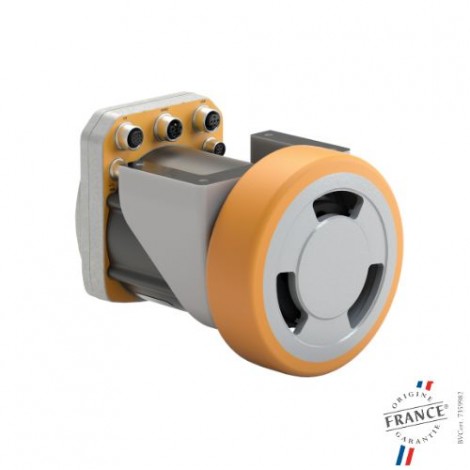

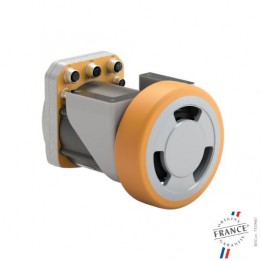
The SWD 125 safety drive wheel is designed for AGV/AMR mobile robots, logistics robots and research platforms that require a compact traction solution with controlled motion, compliant with functional safety requirements.


An open source and comprehensive remote-controlled robotic platform, featuring enhanced hardware for optimal performance.


The LIMO COBOT is a composition of the LIMO PRO, a ROS development and learning platform, equipped with a Mycobot 280 robotic arm.


Discover the ROSbot XL Mobile Robot by Husarion, an autonomous mobile robotic platform designed for Research and Development, rapid prototyping, and creating custom robots for a variety of indoor applications.
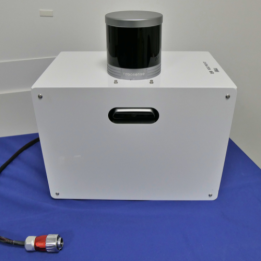
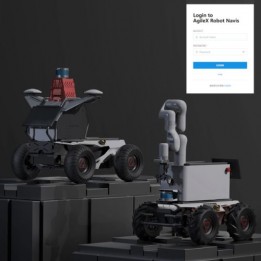
Navis is a autonomous navigation system compatible with all AgileX's robotic platforms. It is designed for semi-enclosed and fully enclosed scenarios.


Discover LIMO, a robot based on an Agilex mobile platform. This evolutionary robotic structure is dedicated to the development of artificial intelligence. LIMO is available in 2 versions: LIMO and LIMO PRO (ROS 2 compatible).


The TurtleBot 4's mobile robot is built on top of the iRobot® Create® 3 educational robot that provides an IMU, optical ground tracking sensor, and wheel encoders for precise positioning and location. TB4 comes in two models: TurtleBot 4 Standard and TurtleBot 4 Lite


The TurtleBot 4's mobile robot is built on top of the iRobot® Create® 3 educational robot that provides an IMU, optical ground tracking sensor, and wheel encoders for precise positioning and location.


The Ranger 4WS4WD Robot features a four-wheel drive and steering configuration, allowing it to traverse rugged terrain and uneven surfaces easily.


The AgileX Ranger Mini 3.0 is a mobile robot with an omni-directional drive-by-wire chassis and multiple movement options. It can handle a wide variety of indoor and outdoor tasks.

The LIMO simulation table tests the LIMO robot’s ability to navigate independently and analyse signals found on its journey.