Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
This video illustrates the capabilities and the existing application for Dynamixel servomotors:
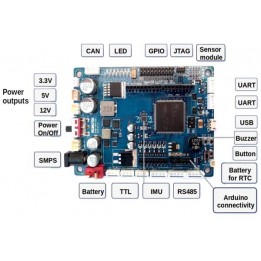
The servomotors have to be linked to a main controller (CM-900 and CM-700) to be commanded. The progams are made with RoboPlus, which allow really easy programmation, without much previous knowledge.
The most recent main controllers support embedded C and there is a SDK for you to developp your own applications.
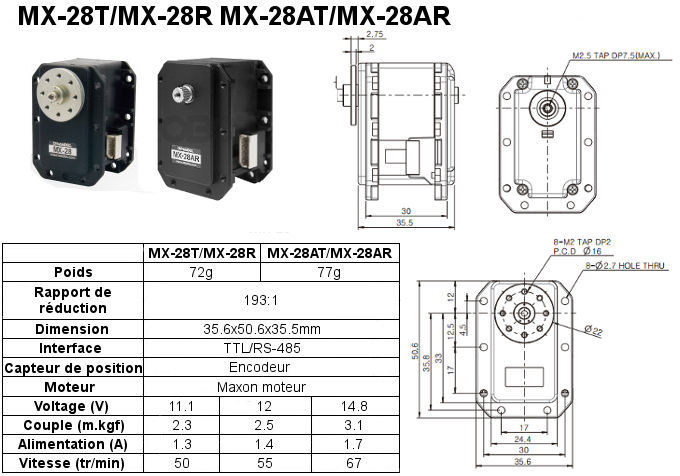
The MX series differs from the other due to features such as a more advanced features on the PID control, 360° control et high speed communication. The MX-28 servomoteur has been splited into two models: the Dynamixel MX-28AT actuator that keeps the Half duplex Asynchronous Serial Communication protocol and the TTL Level Multi Drop physical link, when the MX-28AR uses RS485 communication protocol and multi drop bus.
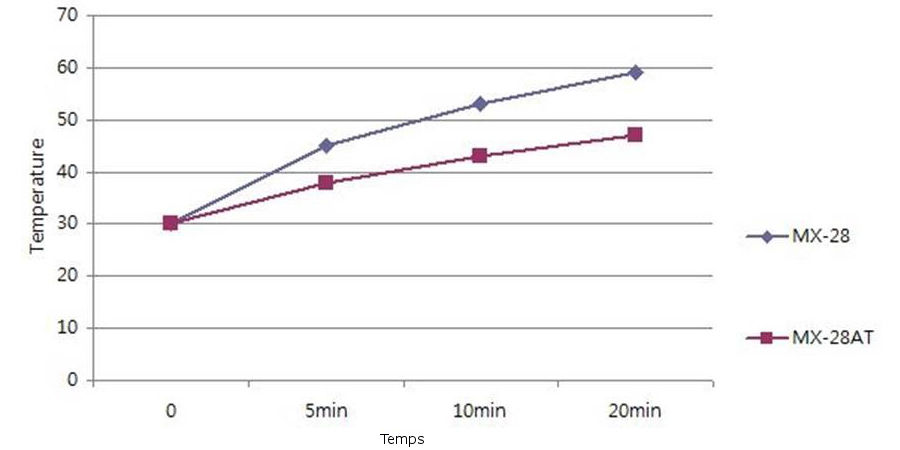
The actuator MX-28AR Dynamixel is an upgrade of the MX-28R model, the two enhancements are:
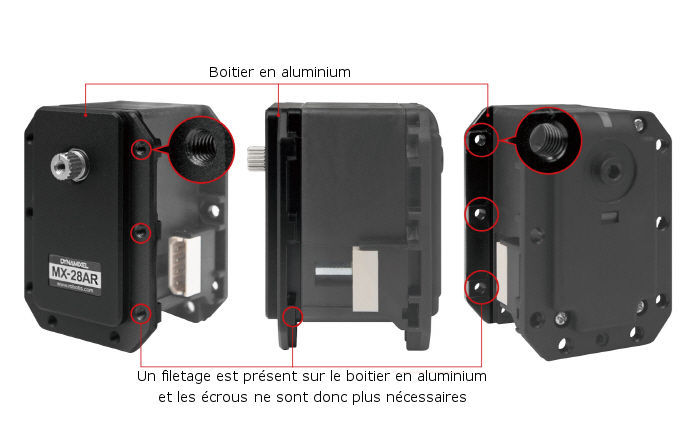
An aluminium body, providing an optimal heat distribution, which allows the actuator to stay cooler than the MX-28R.
The MX-28AR actuator also comes with a new fastening system, thread disks therefore eliminating the need for screws.
All the technical specifications of the Dynamixel MX-28AR actuator are available on the website of the manufacturer at http://support.robotis.com/en/product/dynamixel/mx_series/mx-28at_ar.htm.
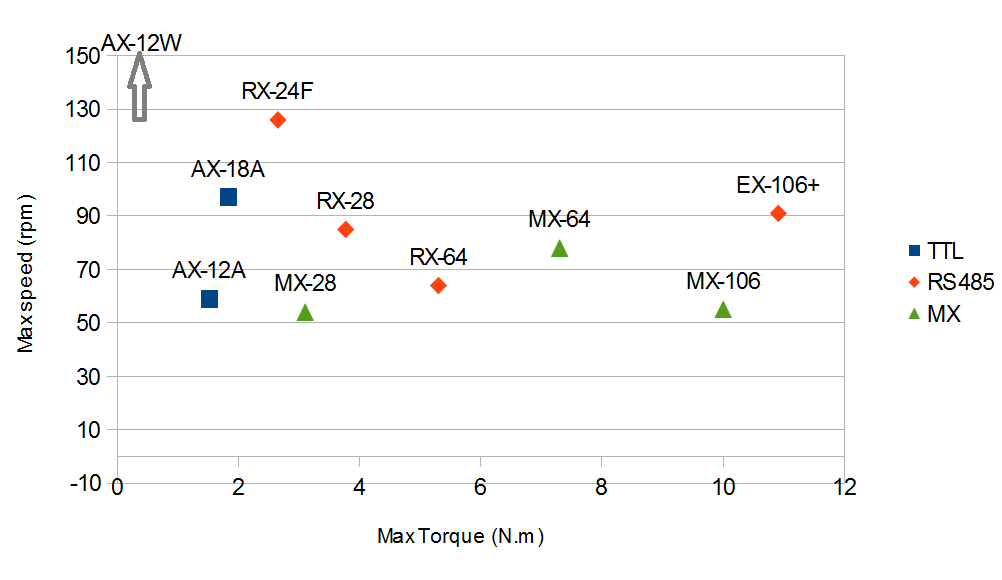
This document offers an overview on the characteristics of all the Dynamixel servomotors.
 Comparison between all Dynamixel servomotors |
The chart below compare the Dynamixel actuators on their performance. Servomotors are differentiated by communication type (and the MX range proposes both protocols).
Check that your Dynamixel servomotor is correctly configured. Do not hesitate to re-flash it with the ROBOTIS Software Roboplus. After re-flash remember to re-configure it. If the issue is not solved, contact us for an advanced support.
The motor is probably not well mounted. Check that you correctly mounted the horns by respecting the mark.
There is probably a mechanical issue with the Dynamixel servomotor. You can directly contact us to get more advance support.
Check your power supply and the system cabling (try with a different servomotor). You can also reset the servo. If nothing works, the best solution is to go through the Dynamixel servomotor checklist!
The 1.0 protocol is dedicated to the Dynamixel AX and MX series. Protocol 2.0 is for the X and Dynamixel Pro series. Protocol 2.0 control tables include PID controls which allow for more precise adjustment of the servo motor movements. Protocol 2.0 can be updated on MX series servo motors. You can refer to the protocol 1.0 and protocol 2.0 pages for more informations.