Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
Including €0.05 for ecotax
Dynamixel is back with a groundbreaking model, the 2XC430-W250-T. A single Dynamixel servomotor to drive two axes. Two degrees of freedom for a single servomotor!
The 2-axis 2XC430-W250-T servomotor resembles in many ways the TTL-connected X-series servomotors from the Robotis laboratory. It is compact, robust and programmable from A to Z thanks to the Dynamixel SDK.

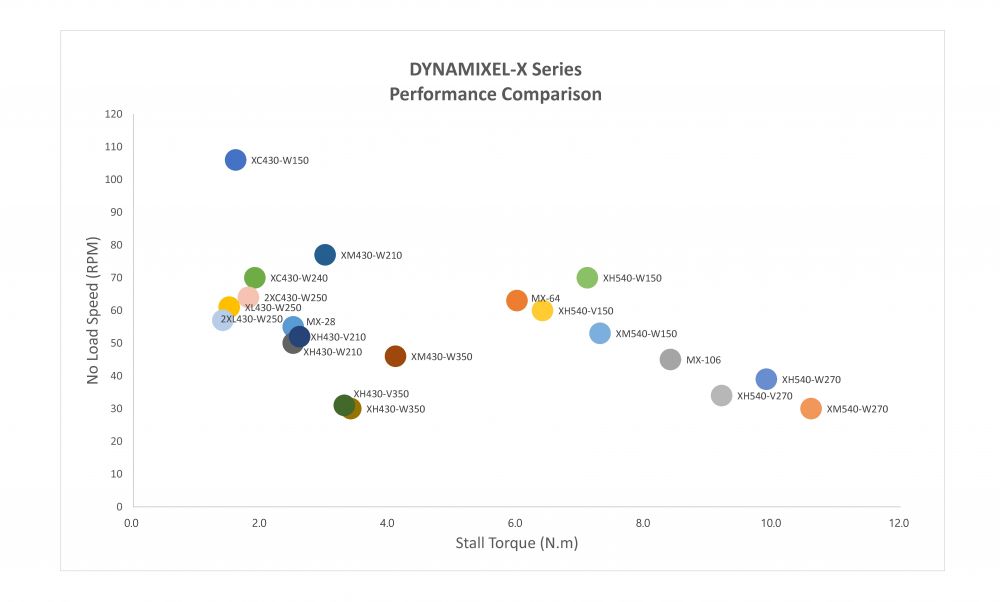
The latest generation Dynamixel servomotors offer a resolution of 4096 pulses per revolution. They allow multiple control modes (speed, PWM, position...), and an ultra-complete feedback. Up to 253 configurable IP addresses allows the creation of very complex projects.
What makes the 2XC430-W250-T so different? The simultaneous management of 2 axes of movement.
In any articulated robotics project, the number of degrees of freedom is usually defined by determining the number of connected servomotors. The 2XC430-W250-T servomotor achieves the same level of performance as a single-axis servomotor.
And yet, it manages two axes of movement, the first at the back, the second at the side. The design of the servo allows it to place the cables in such a way as to avoid any friction.
Free HN11-I101 spreaders for adapting structural parts sold separately.
Check that your Dynamixel servomotor is correctly configured. Do not hesitate to re-flash it with the ROBOTIS Software Roboplus. After re-flash remember to re-configure it. If the issue is not solved, contact us for an advanced support.
The motor is probably not well mounted. Check that you correctly mounted the horns by respecting the mark.
There is probably a mechanical issue with the Dynamixel servomotor. You can directly contact us to get more advance support.
Check your power supply and the system cabling (try with a different servomotor). You can also reset the servo. If nothing works, the best solution is to go through the Dynamixel servomotor checklist!
The 1.0 protocol is dedicated to the Dynamixel AX and MX series. Protocol 2.0 is for the X and Dynamixel Pro series. Protocol 2.0 control tables include PID controls which allow for more precise adjustment of the servo motor movements. Protocol 2.0 can be updated on MX series servo motors. You can refer to the protocol 1.0 and protocol 2.0 pages for more informations.

Dynamixel is back with a groundbreaking model, the 2XC430-W250-T. A single Dynamixel servomotor to drive two axes. Two degrees of freedom for a single servomotor!